






สายการผลิตวาล์วอัตโนมัติ
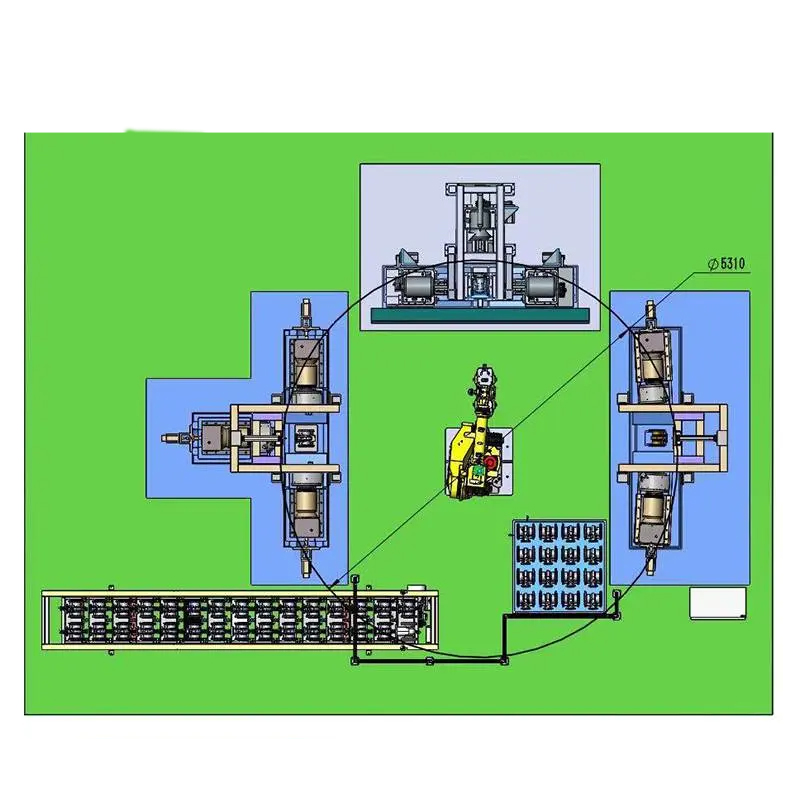



เค้าโครงทั้งหมด
1: อุปกรณ์อัตโนมัติประกอบด้วยศูนย์การกลึงหกแกน ศูนย์การกลึงหลายแกน และศูนย์การกลึงสี่แกน (สามารถกำหนดค่าอุปกรณ์ต่าง ๆ ได้ตามความต้องการของลูกค้า) หุ่นยนต์ได้รับการกำหนดค่าสำหรับการโหลดและการขนถ่าย
2: การจัดวางพื้นที่การประมวลผลเป็นแบบกึ่งปิด และมีการตั้งค่าเฉพาะทางเข้าและทางออกที่ตำแหน่งรางมอเตอร์บนและล่าง ซึ่งใช้ในการโหลดและขนถ่ายตัววาล์ว
3: การโหลดและการขนถ่ายสามารถป้อนโดยตัวป้อนหรือหุ่นยนต์วิสัยทัศน์ได้
รายละเอียดการทำงานอัตโนมัติบางส่วน
1. หุ่นยนต์โหลดและขนถ่ายสามารถเลือกแบรนด์ที่มีชื่อเสียงในระดับสากลหรือในประเทศเพื่อตอบสนองความต้องการในการเดินทางและการโหลดของระบบโหลดและขนถ่ายอัตโนมัตินี้
2. อุปกรณ์ใช้การป้องกันแบบเต็มรูปแบบ โดยมีอุปกรณ์กำจัดฝุ่น ประตูป้องกันจะถูกดันและดึงโดยอัตโนมัติตามคำแนะนำ และเครื่องมือจะถูกยึดและบดโดยอัตโนมัติ
3. หลังจากการประมวลผลเสร็จสมบูรณ์ ชิ้นงานจะถูกวางบนสายพานลำเลียงโดยตรงโดยหุ่นยนต์และขนส่งไปยังกระบวนการถัดไป
4. หุ่นยนต์จับยึดได้รับการออกแบบด้วยตัวจับคู่ ซึ่งสามารถใช้สลับกันเพื่อทำการโหลดและขนถ่ายเครื่องจักรให้เสร็จสมบูรณ์
หมวดหมู่สินค้า
-

เครื่องกัดแนวตั้ง CNC และเครื่องจักรคอมโพสิต...
-

ศูนย์เครื่องจักรกลซีเอ็นซีความเร็วสูงซีรีส์ GM
-

เครื่องกัด CNC ความเร็วสูงซีรีส์ GT
-

เครื่องกลึงซีเอ็นซีแกนคู่ SK32
-

ศูนย์เครื่องจักรกลแนวตั้ง CNC RFTV510 สำหรับเครื่...
-

ศูนย์เครื่องจักรกลแนวตั้ง CNC ซีรีย์ RFMV สำหรับ W...
-

เครื่องกลึงแนวตั้ง CNC RFCL63V/D สำหรับดุมล้อ
-

เครื่องกลึงแนวนอน CNC ซีรีส์ RFCP สำหรับดุมล้อ
-

เครื่องจักรเฉพาะสำหรับเพลาข้อเหวี่ยง HG40/50QZ
-

เครื่องกลึงและเจียร CNC เฉพาะรุ่น HGQM-01
-

เครื่องจักรเฉพาะสำหรับมู่เล่ HG40/50L
-

เครื่องจักรเฉพาะสำหรับเพลาล้อหลัง HGZK-06