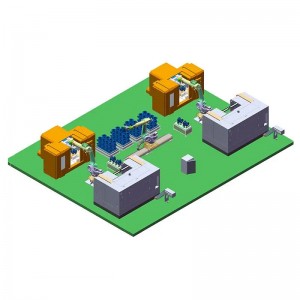
สายการผลิตวาล์วประตูอ่อน


1. ผู้ปฏิบัติงานวางพาเลทที่เต็มไปด้วยชิ้นงานของตัววาล์วในช่องวางตำแหน่งโหลด 1 และช่องวางตำแหน่งโหลด 2 เพื่อวางตำแหน่ง และวางถาดเปล่าในช่องวางตำแหน่งโหลด 1 และช่องวางตำแหน่งขนถ่าย 2 เพื่อวางตำแหน่ง
2. กล้องบนหุ่นยนต์ 1 จะสแกนชิ้นงานบนพาเลทในช่องวางตำแหน่งป้อน 1 เพื่อวางตำแหน่งชิ้นงานอย่างแม่นยำ และจับยึดชิ้นงาน 1 ไว้ในฟิกซ์เจอร์กำหนดตำแหน่งบนโต๊ะกั้น 1
ในขณะเดียวกัน จะจับชิ้นงานที่ผ่านการประมวลผล 3 (หุ่นยนต์ 2 เพิ่งจับจากเครื่องมือกล 2) เคลื่อนไปยังช่องวางตำแหน่งการขนถ่าย 1 และวางอย่างเรียบร้อยในพาเลทตามต้องการ
กล้องบนหุ่นยนต์ 1 จะสแกนชิ้นงานบนพาเลทในช่องกำหนดตำแหน่งการป้อน 2 เพื่อจัดตำแหน่งชิ้นงานอย่างแม่นยำ และชิ้นงาน 4 จะถูกจับยึดและวางในฟิกซ์เจอร์กำหนดตำแหน่งบนโต๊ะกั้น 2
ในขณะเดียวกัน จะจับชิ้นงานที่ผ่านการประมวลผล 6 (หุ่นยนต์ 3 เพิ่งจับจากเครื่องมือกล 4) เคลื่อนไปยังช่องวางตำแหน่งการขนถ่าย 2 และวางอย่างเรียบร้อยในพาเลทตามต้องการ
3.หุ่นยนต์ 2 หนีบชิ้นงาน 1 จากโต๊ะบัฟเฟอร์ 1 และวิ่งไปที่เครื่องมือกล 1 จับชิ้นงานที่เสร็จแล้ว 2 และหนีบชิ้นงาน 1 วิ่งไปที่เครื่องมือกล 2 จับชิ้นงานที่เสร็จแล้ว 3 และหนีบชิ้นงาน 2 และวิ่งไปที่โต๊ะกันชน 1 วางชิ้นงาน 3 หุ่นยนต์ 2 เสร็จสิ้นวงจร
4.หุ่นยนต์ 3 จับชิ้นงาน 4 จากโต๊ะบัฟเฟอร์ 2 และวิ่งไปที่เครื่องมือกล 3 จับชิ้นงานที่เสร็จแล้ว 5 และหนีบชิ้นงาน 4 วิ่งไปยังเครื่องมือกล 4 จับชิ้นงานที่เสร็จแล้ว 6 และหนีบชิ้นงาน 5 และวิ่งไปที่โต๊ะบัฟเฟอร์ 2 วางชิ้นงาน 6 หุ่นยนต์ 3 เสร็จสิ้นวงจร