BOSM-1601 เครื่องกัดคว้านหัวตรงข้าม
1. การใช้อุปกรณ์
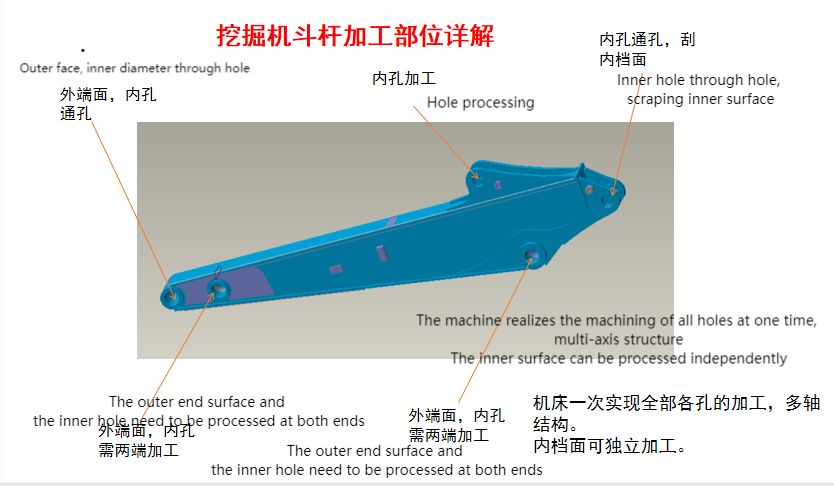
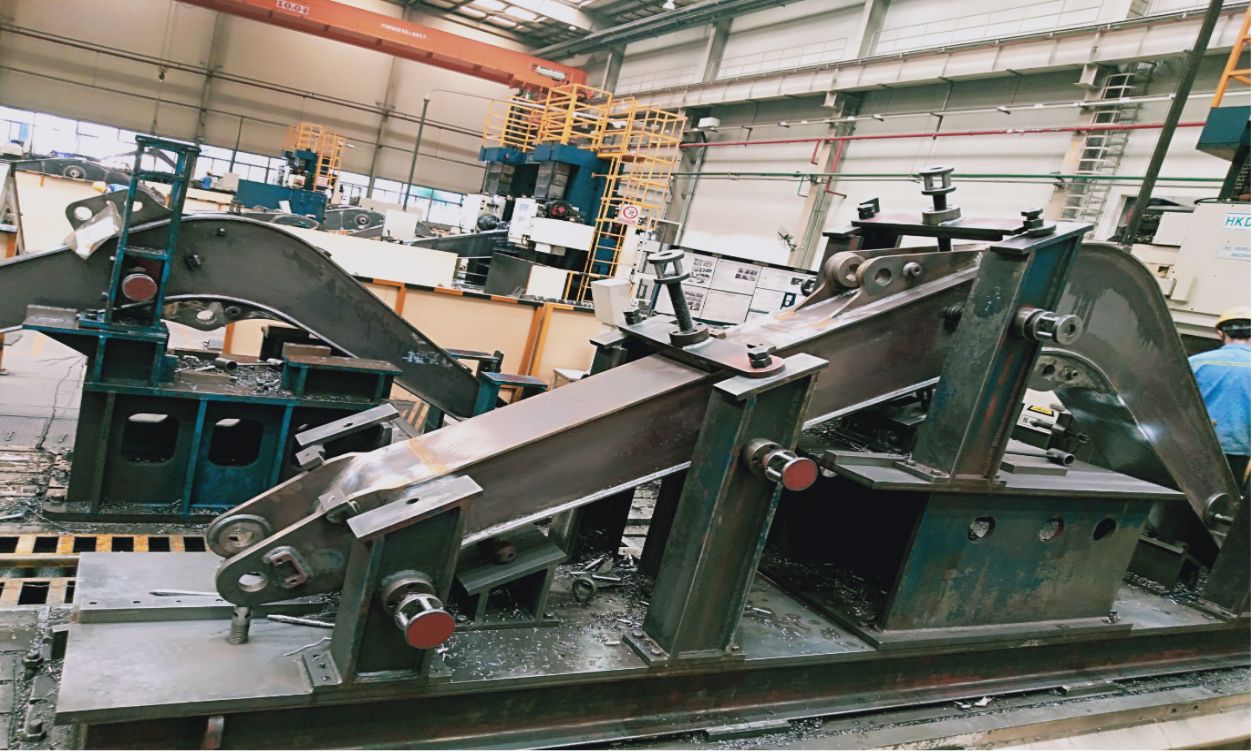
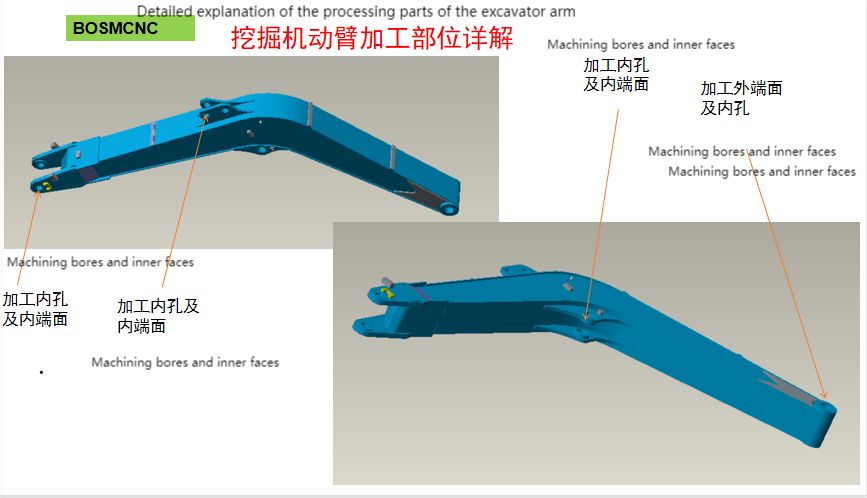
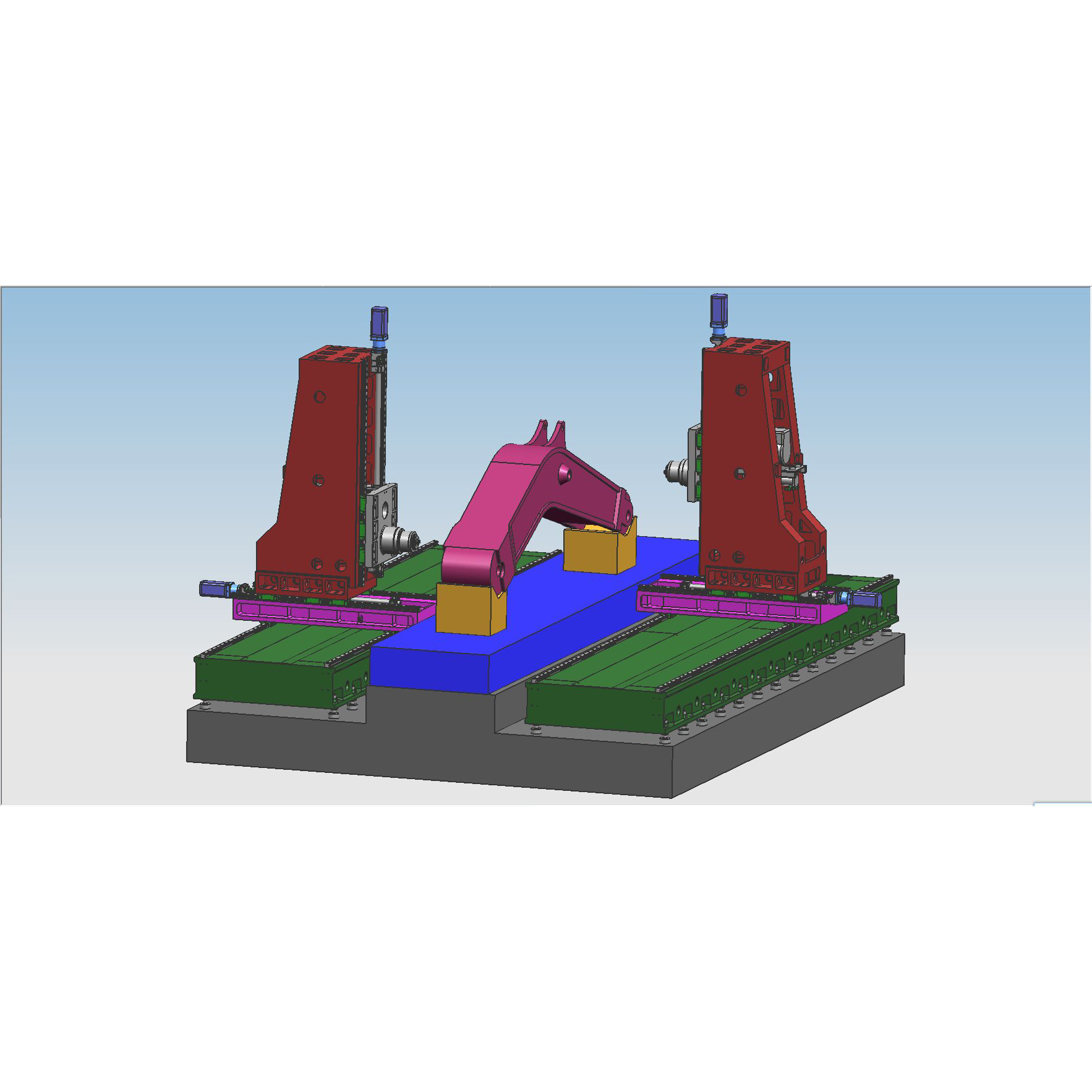
BOSM-1601 เครื่องเจาะและกัดคอลัมน์แบบหัวต่อหัวแบบเคลื่อนที่ได้สองสถานีเป็นเครื่องจักรพิเศษสำหรับชิ้นงานสมมาตรของเครื่องจักรก่อสร้าง เครื่องมีคอลัมน์แบบพิเศษที่สามารถเคลื่อนย้ายได้และชุดเครื่องกระทุ้งแนวนอนสองชุด ซึ่งสามารถรับรู้ถึงการเจาะ การกัด การคว้าน และการประมวลผลอื่น ๆ ของชิ้นงานภายในช่วงจังหวะที่มีประสิทธิภาพ ชิ้นงานสามารถประมวลผลได้ในคราวเดียว (ไม่จำเป็นต้องมีรอง) หนีบ), ความเร็วในการโหลดและขนถ่ายที่รวดเร็ว, ความเร็วในการวางตำแหน่งที่รวดเร็ว, ความแม่นยำในการประมวลผลสูงและประสิทธิภาพการประมวลผลสูง
2.ส่วนประกอบหลักของเครื่อง
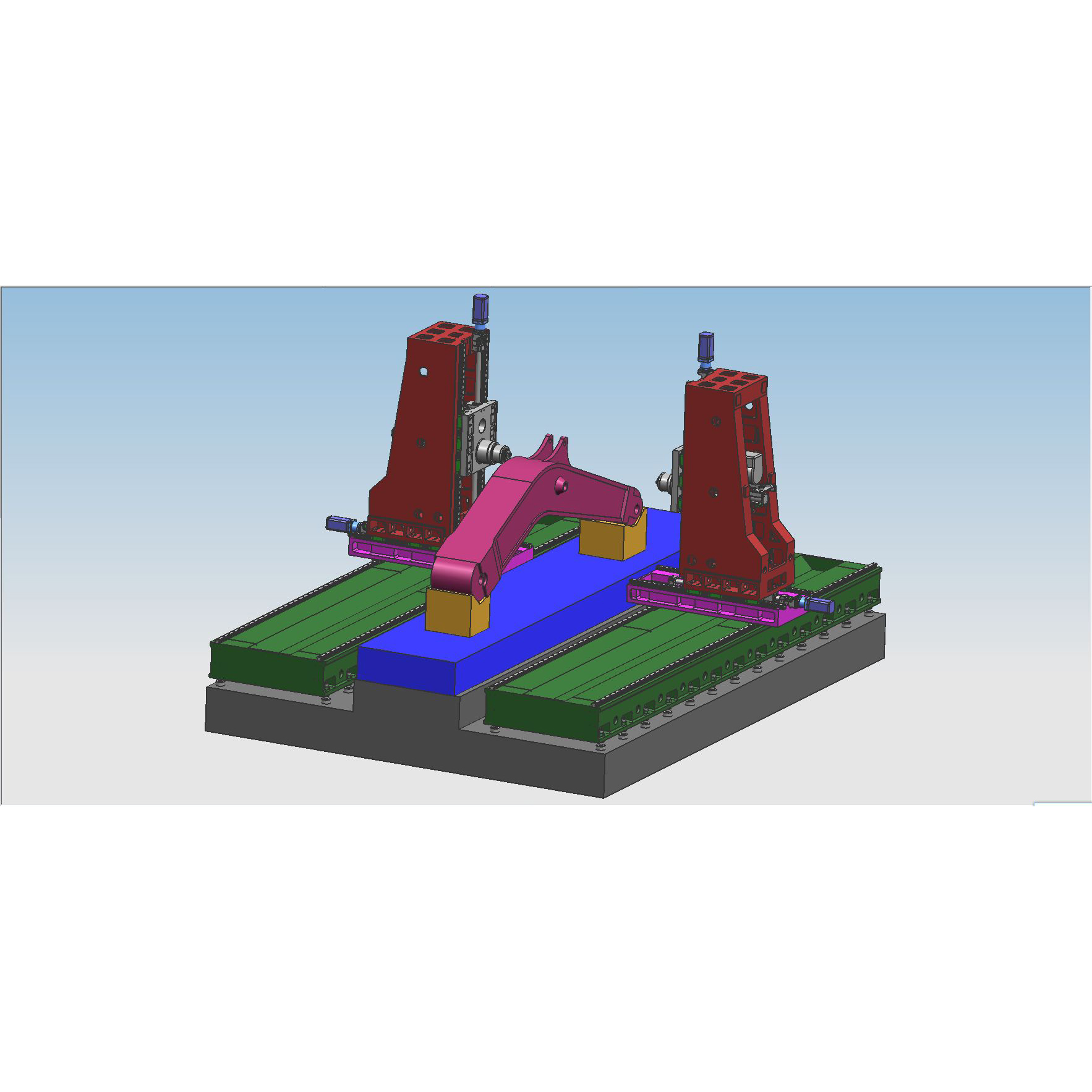
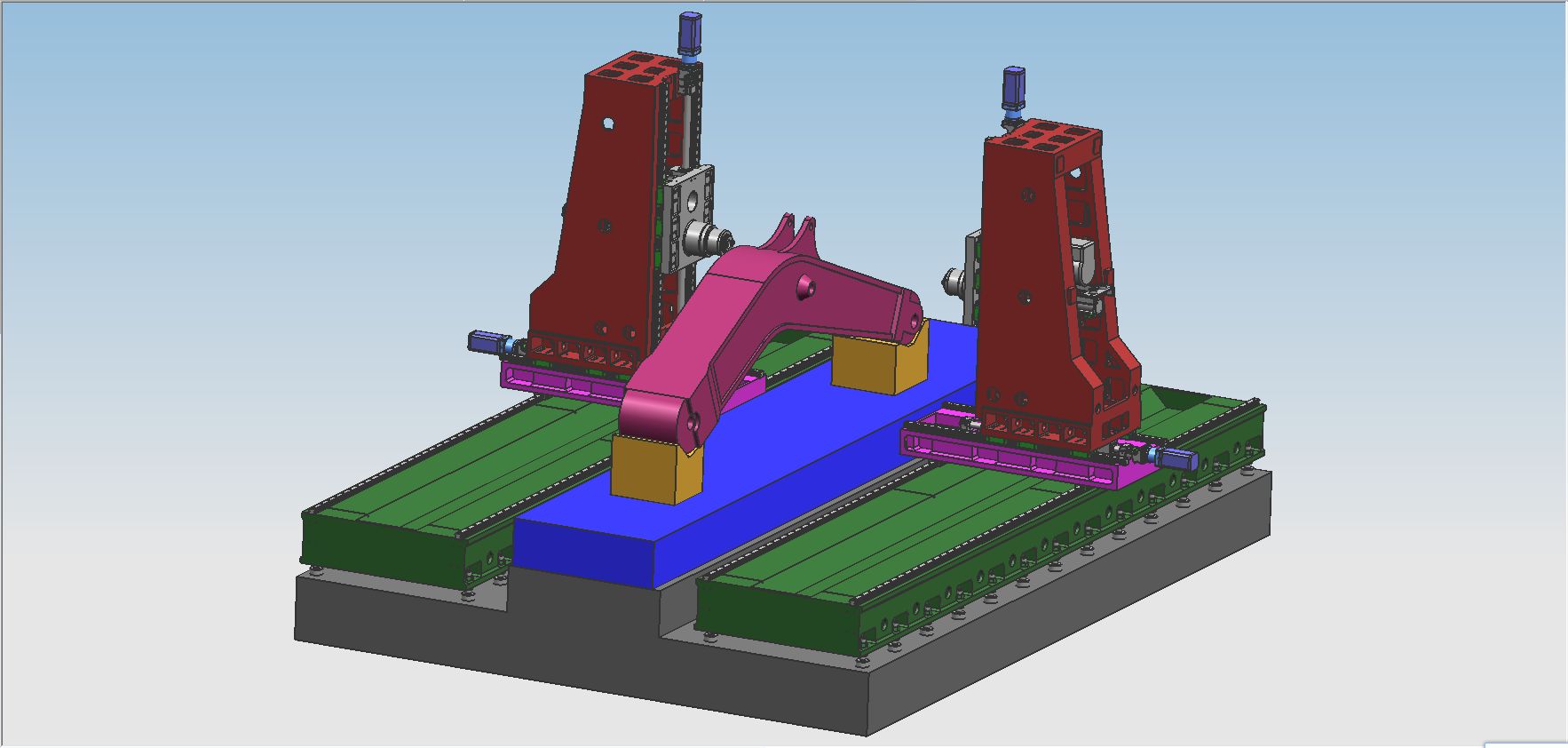
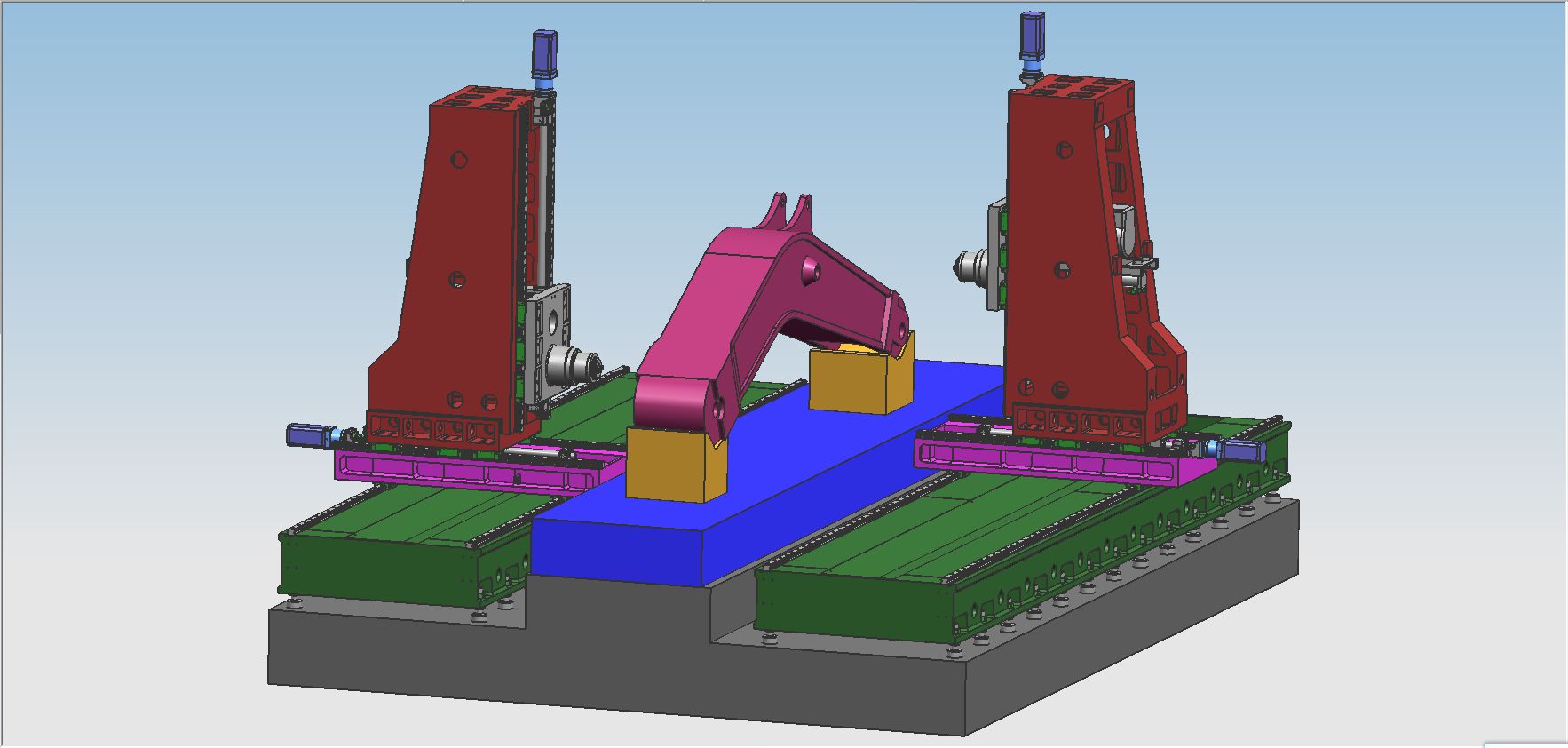
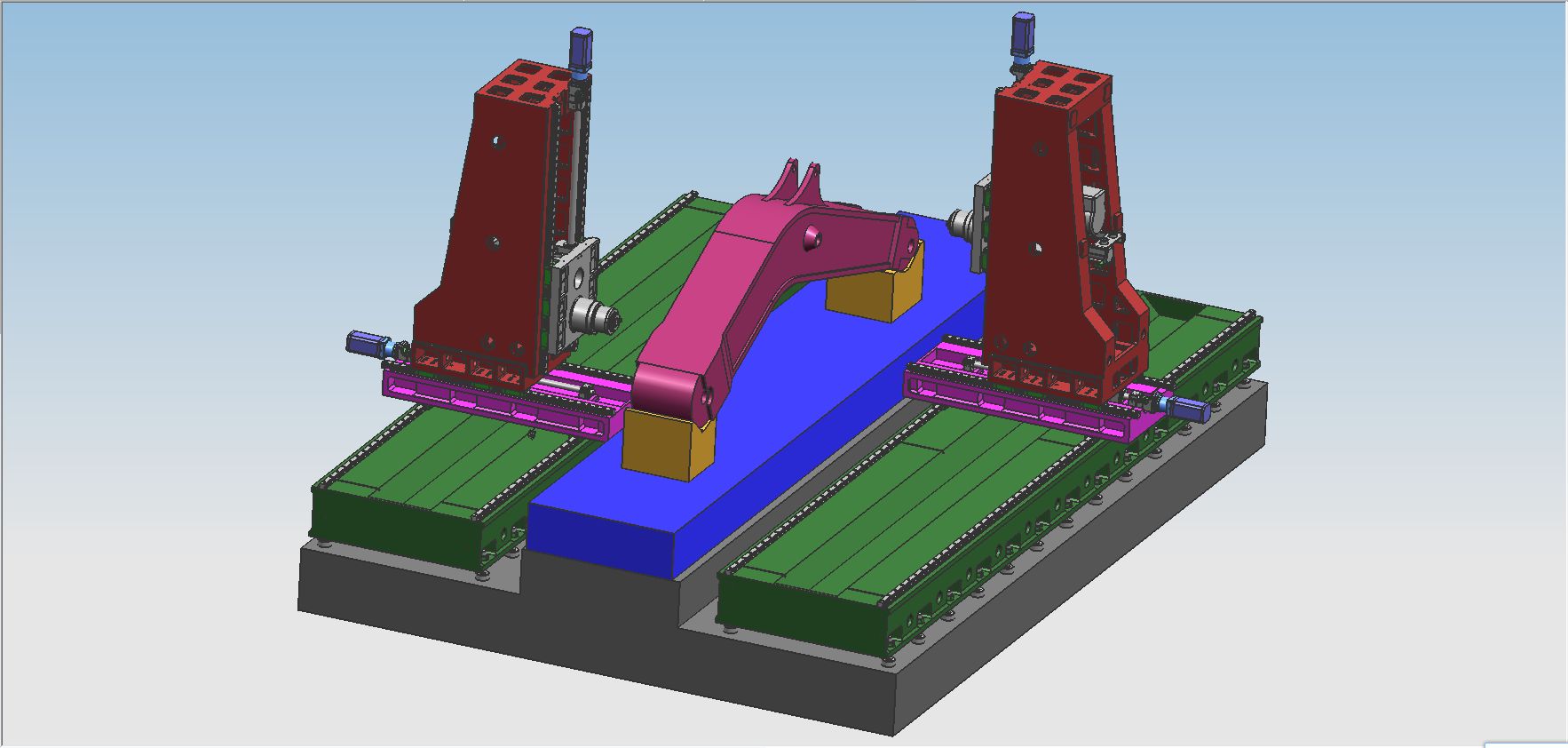
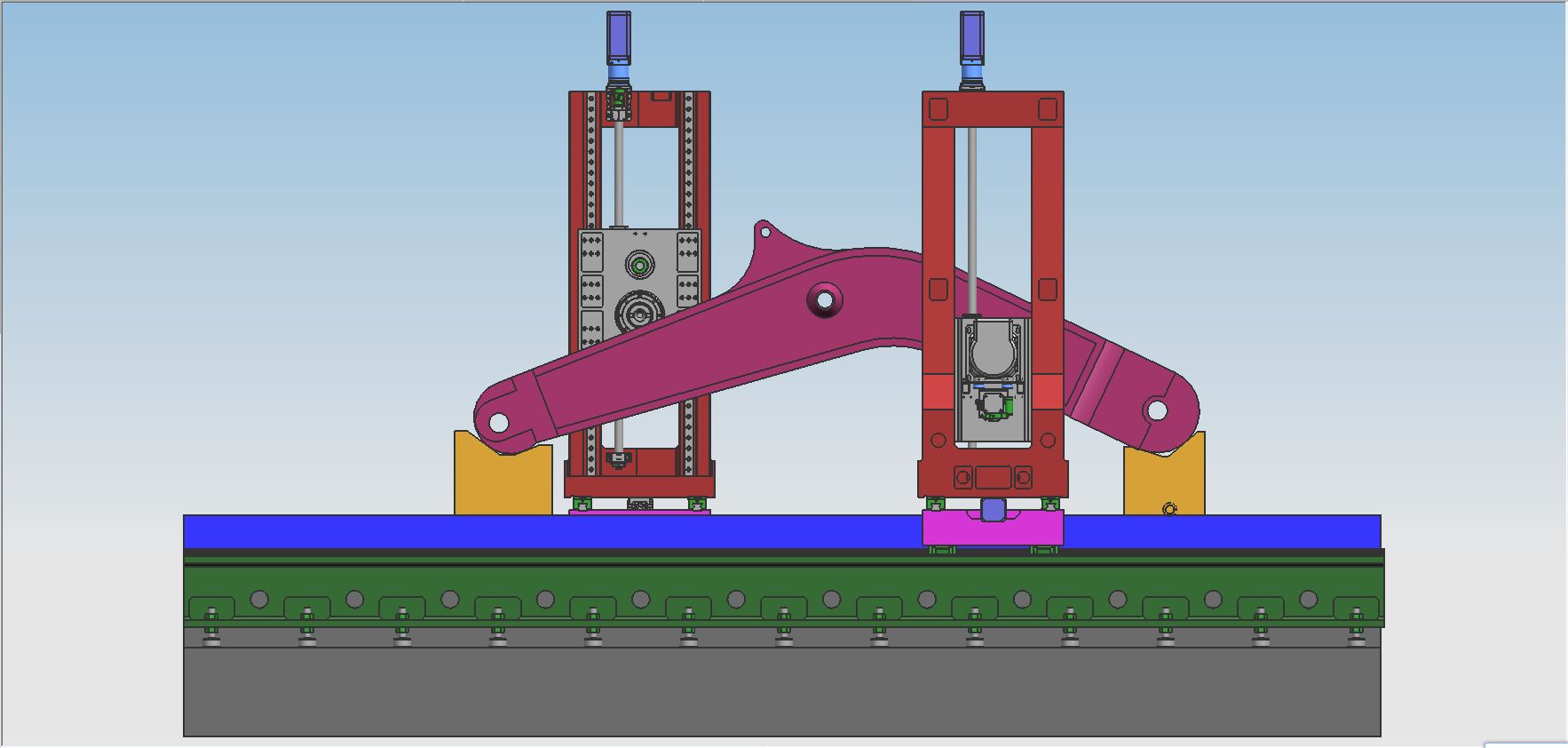
เตียง โต๊ะทำงาน คอลัมน์ซ้ายและขวา คาน อานม้า แกะ และชิ้นส่วนขนาดใหญ่อื่นๆ ล้วนทำจากการปั้นทรายเรซิน การหล่อด้วยเหล็กสีเทาคุณภาพสูง 250 อบอ่อนในหลุมทรายร้อน→อายุการสั่นสะเทือน→การหลอมด้วยเตาร้อน→อายุการสั่นสะเทือน→ การกลึงหยาบ → อายุการสั่นสะเทือน → การหลอมด้วยเตาร้อน → อายุการสั่นสะเทือน → การตกแต่ง ขจัดความเครียดเชิงลบของชิ้นส่วนอย่างสมบูรณ์ และรักษาประสิทธิภาพของชิ้นส่วนให้คงที่ เครื่องจักรมีฟังก์ชันต่างๆ เช่น การกัด การคว้าน การเจาะ การเคาเตอร์ การต๊าป ฯลฯ และวิธีการระบายความร้อนของเครื่องมือคือการระบายความร้อนภายนอก เครื่องจักรประกอบด้วยแกนป้อน 6 แกน ซึ่งสามารถรับรู้การเชื่อมต่อแบบ 4 แกนและการทำงานเดี่ยวแบบ 6 แกน มีหัวจ่ายไฟ 2 หัว ทิศทางตามแนวแกนของเครื่องและหัวจ่ายกำลังแสดงอยู่ในภาพด้านล่าง
2.1โครงสร้างหลักของส่วนป้อนการส่งผ่านแนวแกน
2.1.1 แกน X1/X2:คอลัมน์จะเคลื่อนที่ไปตามแนวยาวตามแนวรางของเตียงคงที่
การส่งผ่านแกน X: ขับเคลื่อนและควบคุมโดยเซอร์โวมอเตอร์ AC ตัวลดดาวเคราะห์ที่มีความแม่นยำสูงขับเคลื่อนทั้งสองคอลัมน์ให้เคลื่อนที่เป็นเส้นตรงไปตามแกน X ผ่านคู่การส่งผ่านบอลสกรู
รูปแบบรางนำ: รางนำเชิงเส้นที่มีความแม่นยำสูงสองรางวางราบเรียบ เกรดความแม่นยำของบอลสกรูในคู่เกียร์คือ C5
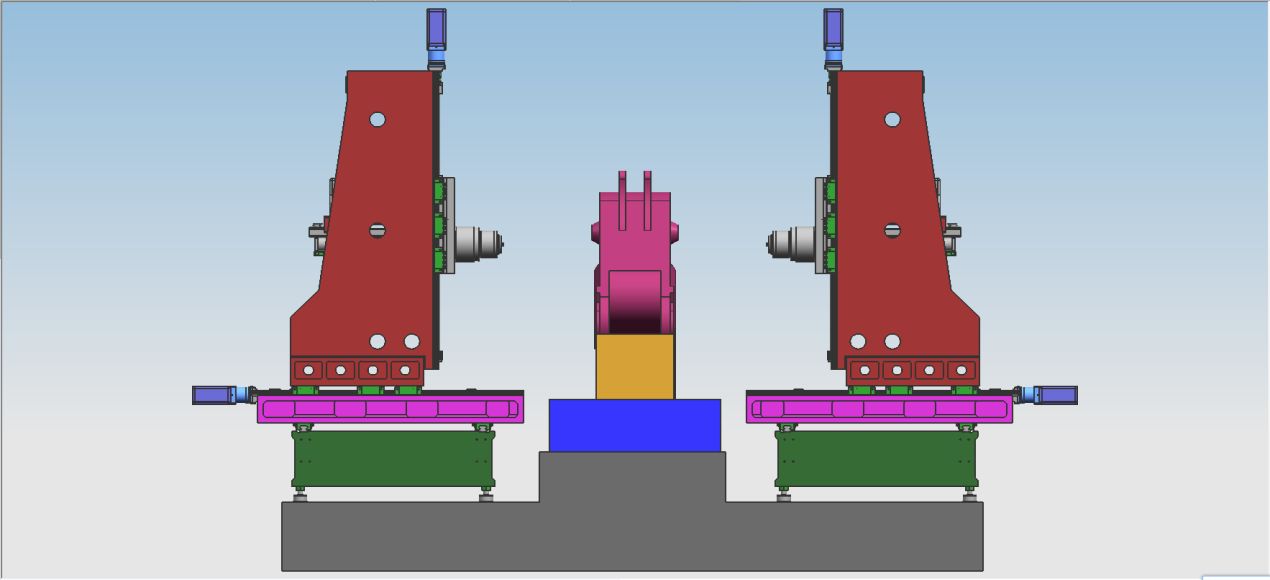
2.1.2 แกน Y1/Y2:หัวกำลังคว้านและกัด I, II และเสาได้รับการติดตั้งตามลำดับบนรางนำฐานที่มีความแข็งแรงสูงทั้งสองด้าน และสลับกันไปมาตามรางนำฐานตามแนวแกน Y1 และ Y2 เซอร์โวมอเตอร์ AC ใช้ในการขับเคลื่อนและควบคุมคู่เกียร์บอลสกรู ลากอานเพื่อเคลื่อนที่ และรับรู้ถึงการเคลื่อนที่เชิงเส้นตามแนวแกน Y
รูปแบบรางนำ: รางนำเชิงเส้น 4 เส้น + ไดรฟ์บอลสกรู เกรดความแม่นยำของบอลสกรูในคู่เกียร์คือ C5 และใช้การควบคุมแบบกึ่งปิดวง
2.1.3 แกน Z1/Z2:หัวกำลังคว้านและกัด I, II และอานแบบเลื่อนได้รับการติดตั้งในแนวตั้งที่ปลายด้านหน้าของเสาทั้งสองด้าน และสลับไปตามแกน Z1 และ Z2 ขึ้นและลงรางนำคอลัมน์
การส่งผ่านแกน Z1: เซอร์โวมอเตอร์ AC ใช้ในการขับเคลื่อนและควบคุมคู่เกียร์ดาวเคราะห์และบอลสกรูที่มีความแม่นยำสูง และตัว ram ถูกขับเคลื่อนให้เคลื่อนที่เป็นเส้นตรงตามแนวแกน Z
รูปแบบรางนำ: ใช้โครงสร้างรางนำเชิงเส้น 2 แบบ เกรดความแม่นยำของบอลสกรูในคู่เกียร์คือ C5
2.2 การถอดและการระบายความร้อนของชิป
มีสายพานลำเลียงชิปแบบโซ่เกลียวและแบบแบนติดตั้งอยู่ทั้งสองด้านใต้โต๊ะทำงาน และสามารถลำเลียงชิปไปยังสายพานลำเลียงชิปได้โดยอัตโนมัติที่ส่วนท้ายโดยใช้แผ่นเกลียวและโซ่สองขั้นตอนเพื่อให้เกิดการผลิตที่มีอารยธรรม มีปั๊มทำความเย็นอยู่ในถังน้ำหล่อเย็นของสายพานลำเลียงชิป ซึ่งสามารถใช้สำหรับระบายความร้อนภายนอกของเครื่องมือเพื่อให้มั่นใจถึงประสิทธิภาพและอายุการใช้งานของเครื่องมือ และสามารถรีไซเคิลสารหล่อเย็นได้
3- ระบบควบคุมตัวเลขดิจิตอลเต็มรูปแบบ:
3.1. ด้วยฟังก์ชันการหักเศษ คุณสามารถตั้งค่าเวลาการหักเศษและรอบการหักเศษบนอินเทอร์เฟซระหว่างคนกับเครื่องจักรได้
3.2. เมื่อติดตั้งฟังก์ชันการยกเครื่องมือแล้ว จะสามารถกำหนดระยะการยกเครื่องมือได้บนอินเทอร์เฟซระหว่างคนกับเครื่องจักร เมื่อถึงระยะทาง เครื่องมือจะถูกยกขึ้นอย่างรวดเร็ว จากนั้นเศษก็จะถูกโยนทิ้งไป จากนั้นจึงส่งต่ออย่างรวดเร็วไปยังพื้นผิวการเจาะและเปลี่ยนการทำงานโดยอัตโนมัติ
3.3. กล่องควบคุมการทำงานแบบรวมศูนย์และชุดมือถือใช้ระบบควบคุมเชิงตัวเลข และติดตั้งอินเทอร์เฟซ USB และจอแสดงผลคริสตัลเหลว LCD เพื่ออำนวยความสะดวกในการเขียนโปรแกรม การจัดเก็บ การแสดงผล และการสื่อสาร อินเทอร์เฟซการทำงานมีฟังก์ชันต่างๆ เช่น บทสนทนาระหว่างคนกับเครื่องจักร การชดเชยข้อผิดพลาด และการเตือนอัตโนมัติ
3.4. อุปกรณ์นี้มีหน้าที่ในการดูตัวอย่างและตรวจสอบตำแหน่งรูอีกครั้งก่อนดำเนินการ และการทำงานสะดวกมาก
4- หล่อลื่นอัตโนมัติ
คู่รางนำเชิงเส้นตรงที่มีความแม่นยำของเครื่องจักร คู่บอลสกรูแบบแม่นยำ และคู่การเคลื่อนที่ที่มีความแม่นยำสูงอื่นๆ ได้รับการติดตั้งระบบหล่อลื่นอัตโนมัติ ปั๊มหล่อลื่นอัตโนมัติจะส่งแรงดันน้ำมันออกมา และห้องน้ำมันหล่อลื่นเชิงปริมาณจะเข้าสู่น้ำมัน หลังจากที่ห้องเก็บน้ำมันเต็มไปด้วยน้ำมัน เมื่อความดันของระบบเพิ่มขึ้นเป็น 1.4-1.75Mpa สวิตช์ความดันในระบบจะปิด ปั๊มจะหยุด และวาล์วขนถ่ายจะถ่ายออกในเวลาเดียวกัน เมื่อแรงดันน้ำมันบนถนนลดลงต่ำกว่า 0.2Mpa สารหล่อลื่นเชิงปริมาณจะเริ่มเติมจุดหล่อลื่นและเติมน้ำมันครบหนึ่งครั้ง เนื่องจากการจ่ายน้ำมันที่แม่นยำของหัวฉีดน้ำมันเชิงปริมาณและการตรวจจับแรงดันของระบบ การจ่ายน้ำมันจึงมีความน่าเชื่อถือ ทำให้มั่นใจได้ว่ามีฟิล์มน้ำมันอยู่บนพื้นผิวของจลนศาสตร์แต่ละคู่ ลดแรงเสียดทานและการสึกหรอ และป้องกันความเสียหาย โครงสร้างภายในที่เกิดจากความร้อนสูงเกินไป เพื่อรับรองความถูกต้องและอายุการใช้งานของเครื่อง เมื่อเปรียบเทียบกับรางเลื่อนคู่รางคู่รางเลื่อนเชิงเส้นที่ใช้ในเครื่องนี้มีข้อดีหลายประการ:
1 ความไวในการเคลื่อนไหวสูง ค่าสัมประสิทธิ์แรงเสียดทานของรางนำกลิ้งมีขนาดเล็ก เพียง 0.0025-0.01 และกำลังขับลดลงอย่างมาก ซึ่งเทียบเท่ากับเครื่องจักรธรรมดาเพียง 1 เครื่องเท่านั้น /10.
2 ความแตกต่างระหว่างแรงเสียดทานแบบไดนามิกและแบบสถิตมีขนาดเล็กมากและประสิทธิภาพการติดตามผลนั้นยอดเยี่ยม กล่าวคือ ช่วงเวลาระหว่างสัญญาณการขับขี่และการกระทำทางกลนั้นสั้นมาก ซึ่งเอื้อต่อการปรับปรุงความเร็วการตอบสนองและความไวของ ระบบควบคุมเชิงตัวเลข 3. เหมาะสำหรับการเคลื่อนที่เชิงเส้นความเร็วสูง และความเร็วทันทีนั้นสูงกว่ารางเลื่อนประมาณ 10 เท่า ④ สามารถรับรู้การเคลื่อนไหวที่ไม่มีช่องว่างและปรับปรุงความแข็งแกร่งในการเคลื่อนไหวของระบบกลไก ⑤ผลิตโดยผู้ผลิตมืออาชีพ มีความแม่นยำสูง คล่องตัวดี และบำรุงรักษาง่าย
5- สภาพแวดล้อมการใช้งานเครื่อง:
5.1. ข้อกำหนดด้านสิ่งแวดล้อมสำหรับการใช้งานอุปกรณ์
การรักษาระดับอุณหภูมิโดยรอบให้คงที่ถือเป็นปัจจัยสำคัญสำหรับการตัดเฉือนที่มีความเที่ยงตรง
(1) ข้อกำหนดอุณหภูมิแวดล้อมที่มีอยู่คือ -10°C ถึง 35°C เมื่ออุณหภูมิแวดล้อมอยู่ที่ 20°C ความชื้นควรอยู่ที่ 40% ถึง 75%
(2) เพื่อรักษาความแม่นยำคงที่ของเครื่องให้อยู่ในช่วงที่กำหนด อุณหภูมิแวดล้อมที่เหมาะสมจะต้องอยู่ที่ 15°C ถึง 25°C และความแตกต่างของอุณหภูมิ
ต้องไม่เกิน ±2°C/24 ชม.
5.2 แรงดันไฟฟ้าของแหล่งจ่ายไฟ: 3 เฟส, 380V ภายในช่วงความผันผวนของแรงดันไฟฟ้า ± 10% ความถี่ของแหล่งจ่ายไฟ: 50HZ
5.3 หากแรงดันไฟฟ้าในพื้นที่ทำงานไม่เสถียร ควรติดตั้งเครื่องด้วยแหล่งจ่ายไฟที่เสถียรเพื่อให้แน่ใจว่าเครื่องทำงานได้ตามปกติ
5.4 เครื่องควรมีการต่อสายดินที่เชื่อถือได้: สายดินเป็นลวดทองแดง เส้นผ่านศูนย์กลางของสายไฟไม่ควรน้อยกว่า 10 มม.² และความต้านทานต่อสายดินมีขนาดเล็กเป็น 4 โอห์ม
5.5 เพื่อให้มั่นใจถึงประสิทธิภาพการทำงานปกติของอุปกรณ์ หากอากาศอัดของแหล่งอากาศไม่สามารถตอบสนองความต้องการของแหล่งอากาศได้ ควรติดตั้งไว้บนเครื่อง
เพิ่มชุดอุปกรณ์ฟอกอากาศจากแหล่งอากาศ (ลดความชื้น ขจัดไขมัน กรอง) ก่อนการฟอกอากาศ
5.6 เก็บอุปกรณ์ให้ห่างจากแสงแดดโดยตรง แหล่งการสั่นสะเทือนและความร้อน เครื่องกำเนิดไฟฟ้าความถี่สูง เครื่องเชื่อมไฟฟ้า ฯลฯ เพื่อหลีกเลี่ยงความล้มเหลวในการผลิตเครื่องจักรหรือการสูญเสียความแม่นยำของเครื่องจักร
6- พารามิเตอร์ทางเทคนิค
| แบบอย่าง | 1601 | |
| การประมวลผลขนาดชิ้นงาน | ยาว × กว้าง × สูง (มม.) | 16000×1000×1500 |
| อัตราป้อนสูงสุดของเครื่อง | ความกว้าง (มม.) | 1300 |
| ขนาดโต๊ะทำงาน | ยาว X กว้าง (มม.) | 16,000*1,000 |
| การเดินทางของคอลัมน์ | คอลัมน์เลื่อนไปมา (มม.) | 1600 |
| หมุนขึ้นลง | การเดินทางขึ้นและลง (มม.) | 1500 |
| ความสูงจากศูนย์กลางแกนหมุนถึงระนาบโต๊ะ | 100-1600มม | |
| แกนหมุนที่มีความแข็งแรงสูงในแนวนอน พลังหัวหนึ่งสอง | ปริมาณ (2) | 2 |
| แกนเรียว | 50 บาท | |
| เจาะ | การเจาะอัตโนมัติ การเปลี่ยนเครื่องมือด้วยตนเอง | |
| เส้นผ่านศูนย์กลางเครื่องตัด (มม.) | ≤Φ200 | |
| เส้นผ่านศูนย์กลางการต๊าป (มม.) | M3-M30 | |
| ความเร็วแกนหมุน (รอบ/นาที) | 30~3000 | |
| กำลังมอเตอร์เซอร์โวแกนหมุน (กิโลวัตต์) | 30*2 | |
|
| ระยะการเคลื่อนที่ซ้ายและขวาระหว่างปลายสปินเดิลทั้งสอง | 400-1600มม |
| ระยะเคลื่อนที่ซ้ายและขวาของเสาคู่ (มม.) | ตัวละ 600 | |
| การระบายความร้อนของเครื่องมือ | ระบายความร้อนภายใน, ระบายความร้อนภายนอก | |
| ความแม่นยำของตำแหน่งแบบสองทิศทาง | 300มม | ±0.032 |
| ความแม่นยำของตำแหน่งซ้ำแบบสองทิศทาง | 300มม | ±0.025 |
| ขนาดเครื่อง | ยาว × กว้าง × สูง (มม.) | ตามแบบ (หากมีการเปลี่ยนแปลงขั้นตอนการออกแบบเราจะแจ้งให้ทราบ) |
| น้ำหนักรวม (t) | 72ต | |