BOSM - เครื่องเจาะและคว้านแนวนอน
1. การใช้อุปกรณ์:
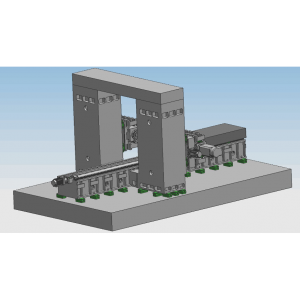
เครื่องเจาะและคว้านเคาน์เตอร์แนวนอน BOSM เป็นเครื่องพิเศษสำหรับบริษัทของคุณในการประมวลผลฝาครอบทาวเวอร์เครนเครื่องจักรนี้มาพร้อมกับหัวเจาะแนวนอนและหัวคว้าน 2 ชุด ซึ่งสามารถรับรู้การเจาะ การกัด และการคว้านของชิ้นงานภายในระยะการชักที่มีประสิทธิภาพการตัดและการประมวลผลอื่น ๆ ความเร็วในการวางตำแหน่งอุปกรณ์รวดเร็ว ความแม่นยำในการประมวลผลสูง และประสิทธิภาพการประมวลผลสูง
2. ลักษณะโครงสร้างอุปกรณ์:
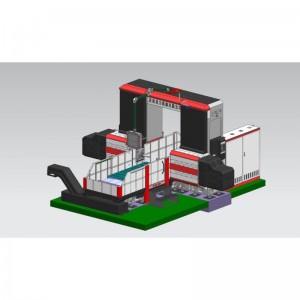
2. 1. ส่วนประกอบหลักของเครื่องจักร
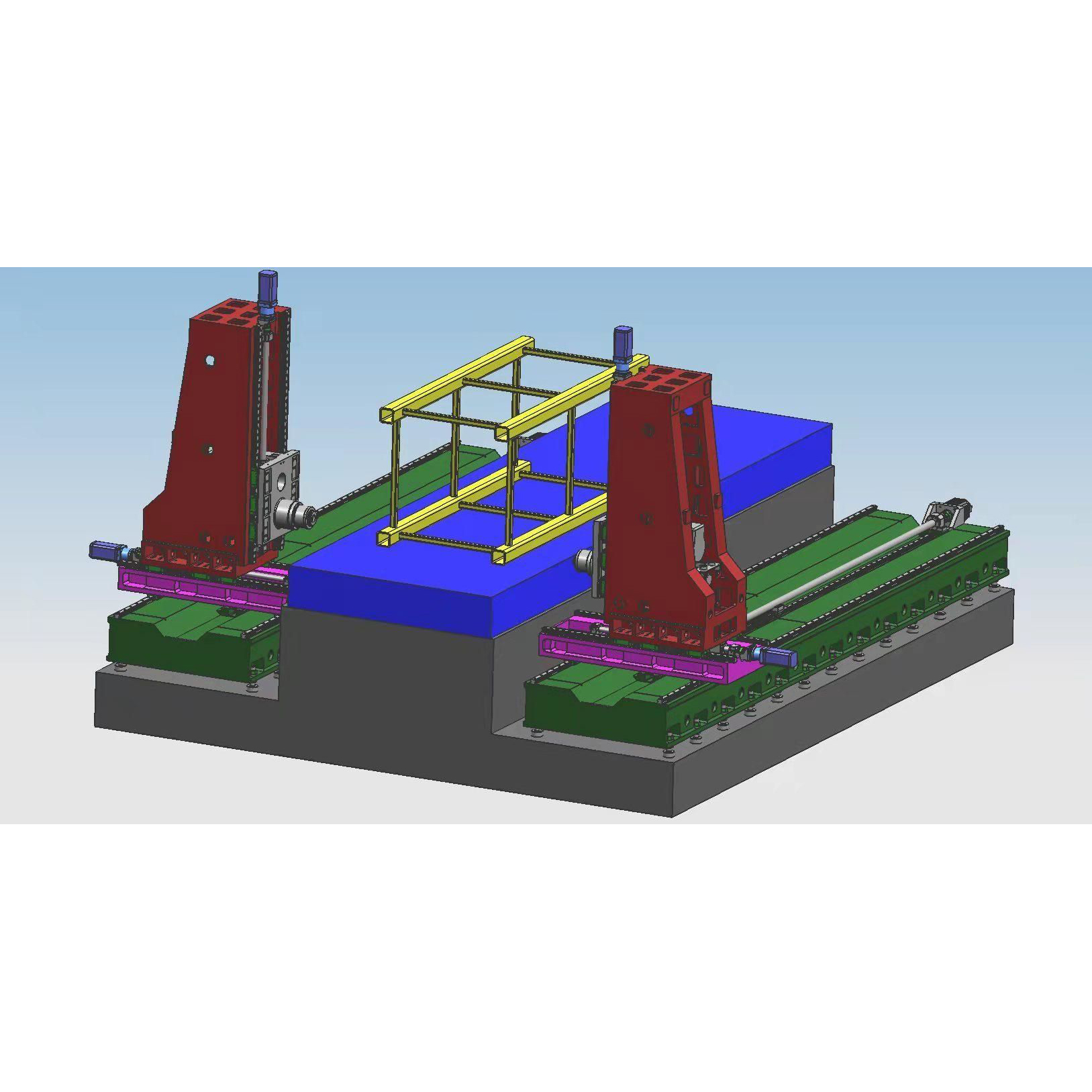
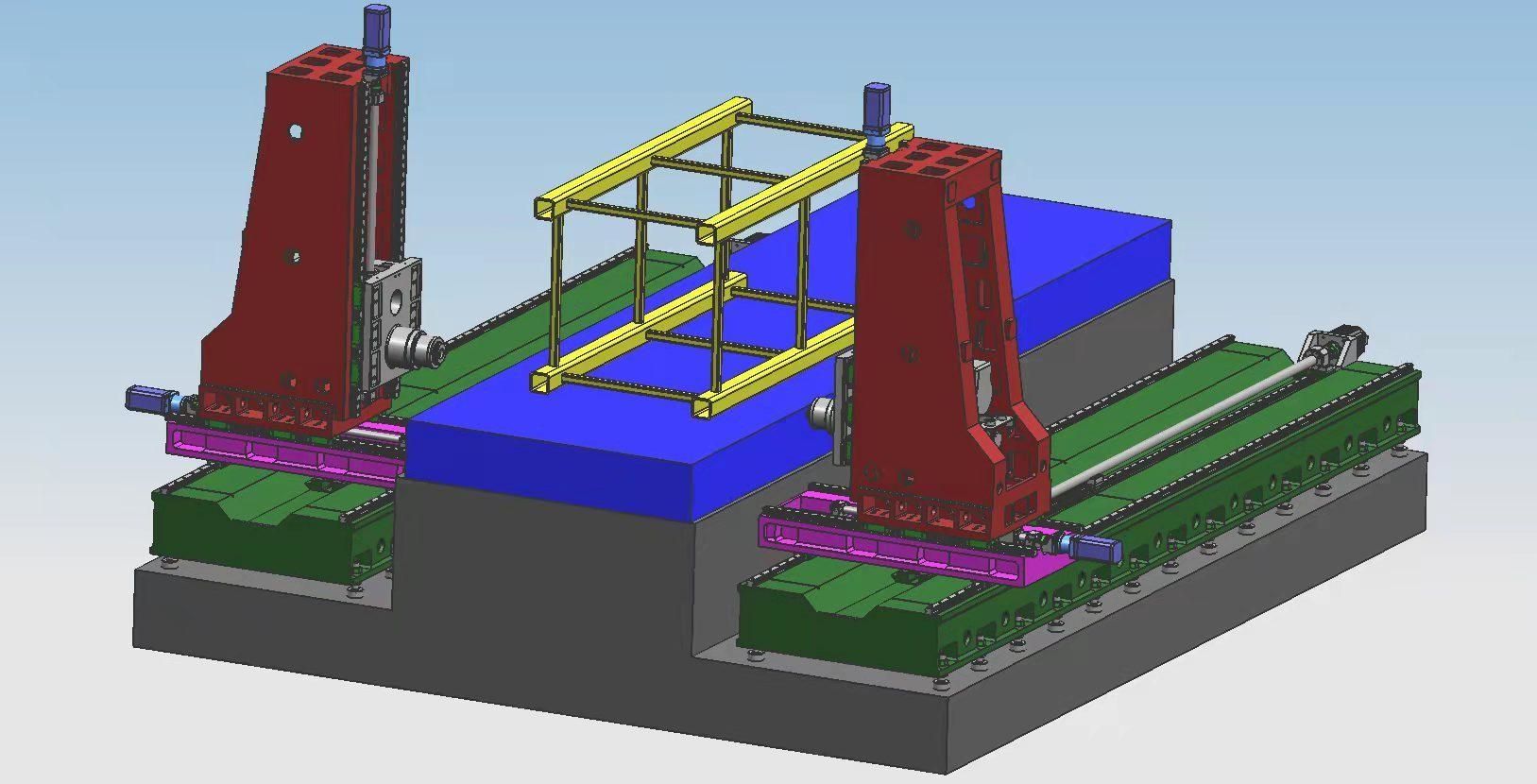
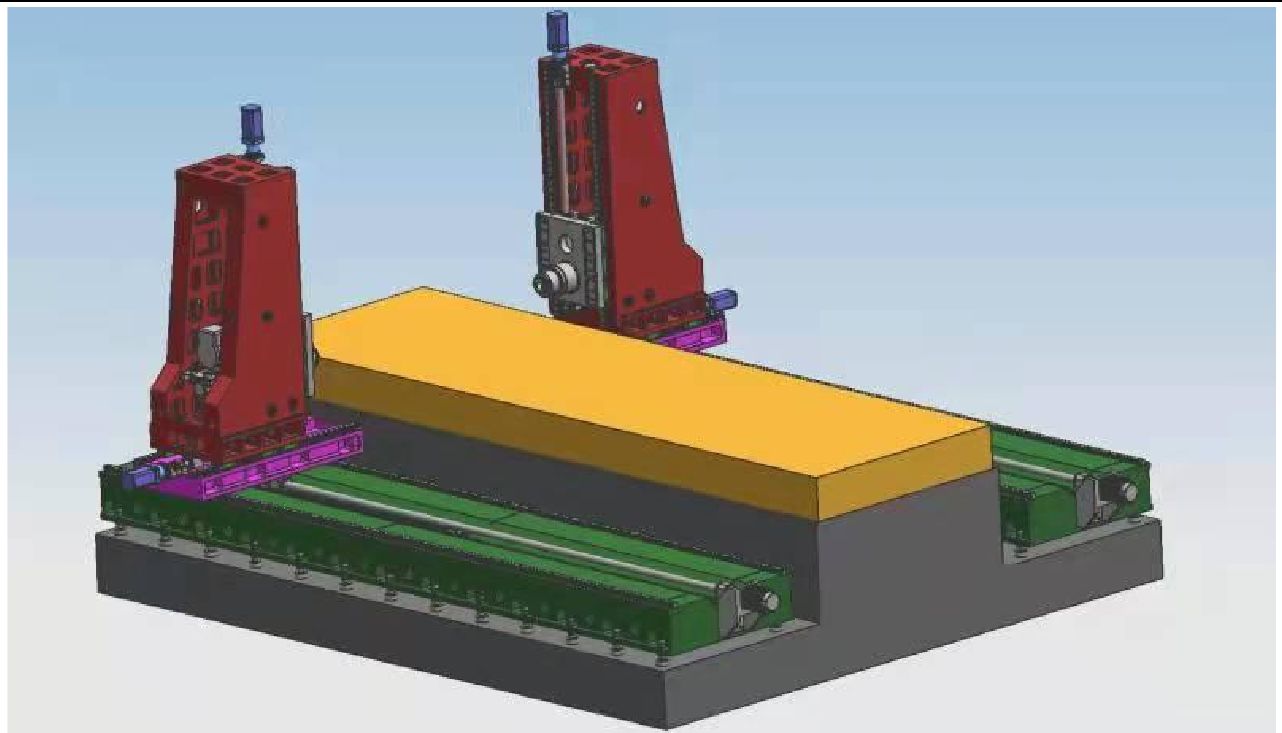
ส่วนประกอบหลักของเครื่องจักร: เตียง โต๊ะทำงาน เสาด้านซ้ายและขวา อานม้า แกะ ฯลฯ ชิ้นส่วนขนาดใหญ่ทำจากเรซินทรายขึ้นรูป การหล่อเหล็กสีเทาคุณภาพสูง 250 อบอ่อนในบ่อทรายร้อน→การเสื่อมสภาพจากการสั่นสะเทือน→ร้อน การหลอมเตาหลอม→อายุการสั่นสะเทือน→การตัดเฉือนหยาบ→อายุการสั่นสะเทือน→การหลอมเตาหลอม→อายุการสั่นสะเทือน→การตกแต่งเพื่อกำจัดความเครียดเชิงลบของชิ้นส่วนอย่างสมบูรณ์และรักษาประสิทธิภาพของชิ้นส่วนให้คงที่โต๊ะทำงานของอุปกรณ์ได้รับการแก้ไขแล้ว และหัวไฟฟ้าทั้งสองด้านสามารถเคลื่อนไปด้านหน้าและด้านหลังของฐานได้เครื่องจักรมีฟังก์ชันต่างๆ เช่น การเจาะ การคว้าน การจม การต๊าป ฯลฯ วิธีการระบายความร้อนของเครื่องมือคือการระบายความร้อนภายในบวกกับการระบายความร้อนภายนอกเครื่องประกอบด้วย 5 แกนฟีด หัวตัด 2 หัว ซึ่งสามารถซิงโครไนซ์กับ 5 แกนพร้อมกัน หรือสามารถทำงานเดี่ยวได้ทิศทางตามแนวแกนของเครื่องจักรและหัวจ่ายไฟจะแสดงในรูปด้านล่าง
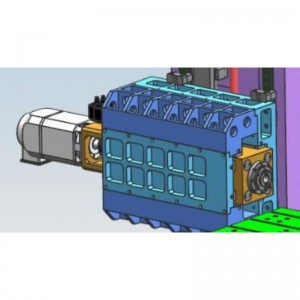
2. 2 โครงสร้างหลักของส่วนฟีดเกียร์ตามแนวแกน
2.2.1 แกน X: หัวไฟฟ้าจะหันไปทางด้านข้างตามรางนำทางของฐาน
ไดรฟ์แกน X1: เซอร์โวมอเตอร์ AC และตัวลดดาวเคราะห์ที่มีความแม่นยำสูงใช้เพื่อขับเคลื่อนหัวจ่ายไฟผ่านไดรฟ์บอลสกรูเพื่อให้ได้การเคลื่อนที่เชิงเส้นของแกน X
การส่งผ่านแกน X2: เซอร์โวมอเตอร์ AC และตัวลดดาวเคราะห์ที่มีความแม่นยำสูงใช้เพื่อขับเคลื่อนหัวพลังงานผ่านการส่งบอลสกรูเพื่อให้เกิดการเคลื่อนที่เชิงเส้นแกน X
รูปแบบรางนำ: รางนำเชิงเส้นตรงที่มีความเที่ยงตรงสูง 2 รางเรียงต่อกันบนฐานที่กว้างขึ้น
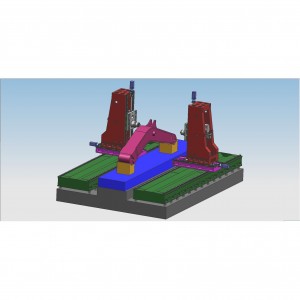
2.2 แกน Y1: หัวไฟฟ้าจะตอบสนองขึ้นและลงบนคอลัมน์
ไดรฟ์แกน Y1: ใช้เซอร์โวมอเตอร์ AC เพื่อขับเคลื่อนผ่านบอลสกรูเพื่อให้ทราบการเคลื่อนที่เชิงเส้นของแกน Y1รูปแบบรางนำ: รางนำเชิงเส้นชนิด 45 จำนวน 4 ชิ้น
2.2.3 แกน Y2: หัวไฟฟ้าจะตอบสนองขึ้นและลงบนคอลัมน์
การส่งผ่านแกน Y2: เซอร์โวมอเตอร์ AC ใช้เพื่อขับเคลื่อนผ่านบอลสกรูเพื่อให้เกิดการเคลื่อนที่เชิงเส้นของแกน Y1
รูปแบบรางนำ: รางนำเชิงเส้นชนิด 45 จำนวน 4 ชิ้น
2.2.4 แกน Z1: หัวไฟฟ้าหมุนกลับไปกลับมาบนอาน
การส่งผ่านแกน Z1: เซอร์โวมอเตอร์ AC และตัวลดดาวเคราะห์ที่มีความแม่นยำสูงใช้เพื่อขับเคลื่อนการเคลื่อนที่ผ่านบอลสกรูเพื่อให้ได้การเคลื่อนที่เชิงเส้นของแกน Z1
2.2.5 แกน Z2: หัวไฟฟ้าหมุนกลับไปกลับมาบนอาน
การส่งผ่านแกน Z2: เซอร์โวมอเตอร์ AC และตัวลดดาวเคราะห์ที่มีความแม่นยำสูงใช้เพื่อขับเคลื่อนการเคลื่อนที่ผ่านบอลสกรูเพื่อให้เกิดการเคลื่อนที่เชิงเส้นของแกน Z2
2.3. การกำจัดชิปและการระบายความร้อน
มีสายพานลำเลียงเศษโซ่แบบแบนติดตั้งอยู่ที่ทั้งสองด้านใต้โต๊ะทำงาน และสามารถปล่อยเศษเหล็กไปยังสายพานลำเลียงเศษในตอนท้ายเพื่อให้เกิดการผลิตที่มีอารยธรรมมีปั๊มระบายความร้อนในถังน้ำหล่อเย็นของสายพานลำเลียงชิป ซึ่งสามารถใช้สำหรับการระบายความร้อนภายใน + การระบายความร้อนภายนอกของเครื่องมือ เพื่อให้มั่นใจในประสิทธิภาพและอายุการใช้งานของเครื่องมือ และน้ำหล่อเย็นสามารถนำไปรีไซเคิลได้
3.ระบบควบคุมตัวเลขดิจิตอลเต็มรูปแบบ:
3.1.ด้วยฟังก์ชันการหักเศษ เวลาการหักเศษ และรอบการหักเศษสามารถตั้งค่าได้บนอินเทอร์เฟซระหว่างคนกับเครื่องจักร
3.2.ด้วยฟังก์ชันการยกเครื่องมือ ระยะการยกของเครื่องมือสามารถตั้งค่าได้บนอินเทอร์เฟซระหว่างคนกับเครื่องจักรเมื่อถึงระยะทาง เครื่องมือจะถูกยกขึ้นอย่างรวดเร็ว จากนั้นเศษจะถูกโยนทิ้ง จากนั้นกรอไปข้างหน้าอย่างรวดเร็วไปยังพื้นผิวการเจาะและแปลงให้ทำงานโดยอัตโนมัติ
3.2.กล่องควบคุมการทำงานแบบรวมศูนย์และเครื่องพกพานำระบบควบคุมแบบตัวเลขมาใช้ และติดตั้งอินเทอร์เฟซ USB และจอแสดงผลคริสตัลเหลว LCDเพื่ออำนวยความสะดวกในการเขียนโปรแกรม การจัดเก็บ การแสดงผล และการสื่อสาร อินเทอร์เฟซการทำงานมีฟังก์ชันต่างๆ เช่น บทสนทนาระหว่างคนกับเครื่องจักร การชดเชยข้อผิดพลาด และการเตือนอัตโนมัติ
3.2.. อุปกรณ์มีฟังก์ชั่นการแสดงตัวอย่างและตรวจสอบตำแหน่งรูอีกครั้งก่อนการประมวลผลและการใช้งานสะดวกมาก
4.หล่อลื่นอัตโนมัติ
คู่รางนำเชิงเส้นความแม่นยำของเครื่องจักร คู่บอลสกรูที่แม่นยำ และคู่การเคลื่อนที่ที่มีความแม่นยำสูงอื่นๆ ติดตั้งระบบหล่อลื่นอัตโนมัติปั๊มหล่อลื่นอัตโนมัติจะส่งน้ำมันแรงดันออกมา และห้องน้ำมันหล่อลื่นเชิงปริมาณจะเข้าสู่น้ำมันเมื่อห้องน้ำมันเต็มไปด้วยน้ำมันและความดันของระบบเพิ่มขึ้นเป็น 1.4~1.75Mpa สวิตช์ความดันในระบบจะปิด ปั๊มจะหยุด และวาล์วขนถ่ายจะถูกขนถ่ายในเวลาเดียวกันเมื่อแรงดันน้ำมันบนถนนลดลงต่ำกว่า 0.2Mpa เครื่องหล่อลื่นเชิงปริมาณจะเริ่มเติมน้ำมันที่จุดหล่อลื่นและทำการเติมน้ำมันหนึ่งครั้งเนื่องจากปริมาณน้ำมันที่แม่นยำโดยเครื่องจ่ายน้ำมันเชิงปริมาณและความสามารถในการตรวจจับแรงดันของระบบ การจ่ายน้ำมันจึงเชื่อถือได้และทำให้มั่นใจได้ว่ามีฟิล์มน้ำมันบนพื้นผิวของคู่ไคเนมาติกแต่ละคู่ ซึ่งช่วยลดแรงเสียดทานและการสึกหรอ และป้องกันความเสียหาย ต่อโครงสร้างภายในที่เกิดจากความร้อนสูงเกินไปเพื่อให้แน่ใจว่าความถูกต้องและอายุการใช้งานของเครื่องจักร
5. เครื่องจักรใช้สภาพแวดล้อม:
แหล่งจ่ายไฟ: AC380V±10% สามเฟส, 50Hz±1 อุณหภูมิแวดล้อม: -10°~ 45°
6.เกณฑ์การยอมรับ:
JB/T10051-1999 "ข้อกำหนดทางเทคนิคทั่วไปสำหรับระบบไฮดรอลิกของเครื่องตัดโลหะ"
7.พารามิเตอร์ทางเทคนิค:
| แบบอย่าง | 2050-5Z | |
| ขนาดชิ้นงานการประมวลผลสูงสุด | ยาว × กว้าง × สูง (มม.) | 5000×2000×1500 |
| ขนาดโต๊ะทำงาน | ยาว X กว้าง (มม.) | 5,000*2000 |
| ทิศทางการเคลื่อนที่ของฐานหัวไฟฟ้า | เลื่อนไปมา (มม.) | 5,000 |
| หัวพลังงานขึ้นและลง | ระยะกระทุ้งขึ้นลง (มม.) | 1500 |
|
หัวเจาะชนิดกระทุ้งแนวนอน หัวเพาเวอร์ 1 2 | จำนวน (2 ชิ้น) | 2 |
| แกนเตเปอร์ | บีที50 | |
| เส้นผ่านศูนย์กลางการเจาะ (มม.) | Φ2-Φ60 | |
| เส้นผ่านศูนย์กลางการต๊าปเกลียว (มม.) | M3-M30 | |
| ความเร็วแกนหมุน (รอบ/นาที) | 30~3000 | |
| กำลังมอเตอร์แกนเซอร์โว (กิโลวัตต์) | 22*2 | |
| ระยะเคลื่อนที่ซ้ายและขวา (มม.) | 600 | |
| ความแม่นยำของตำแหน่งแบบสองทิศทาง | 300มม.*300มม | ±0.025 |
| ความแม่นยำในการวางตำแหน่งซ้ำแบบสองทิศทาง | 300มม.*300มม | ±0.02 |