BOSM -5020-5Z เครื่องกัดคว้านหัวตรงข้าม
1.การใช้อุปกรณ์:
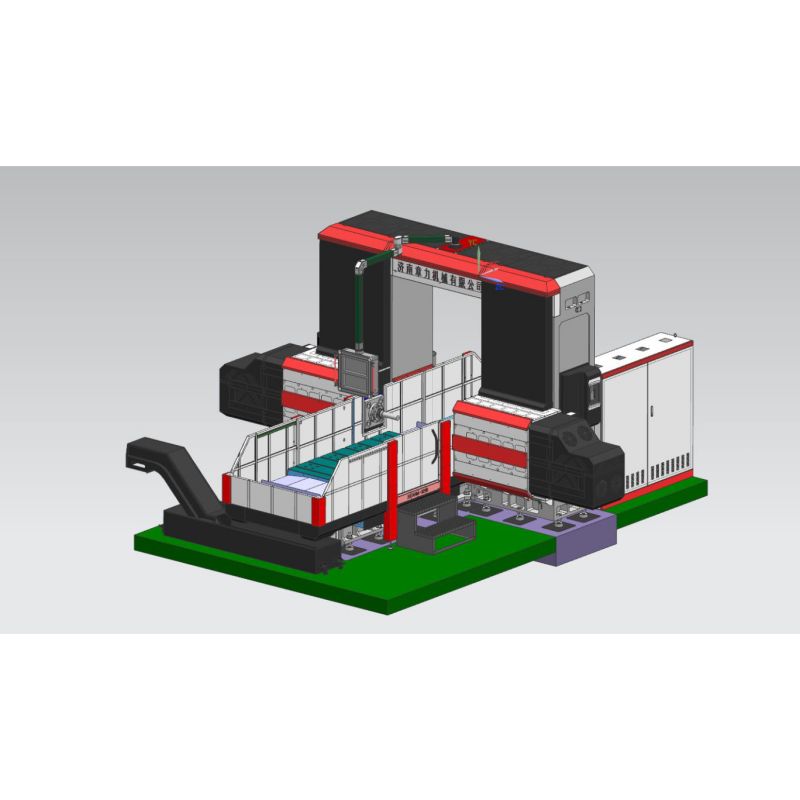
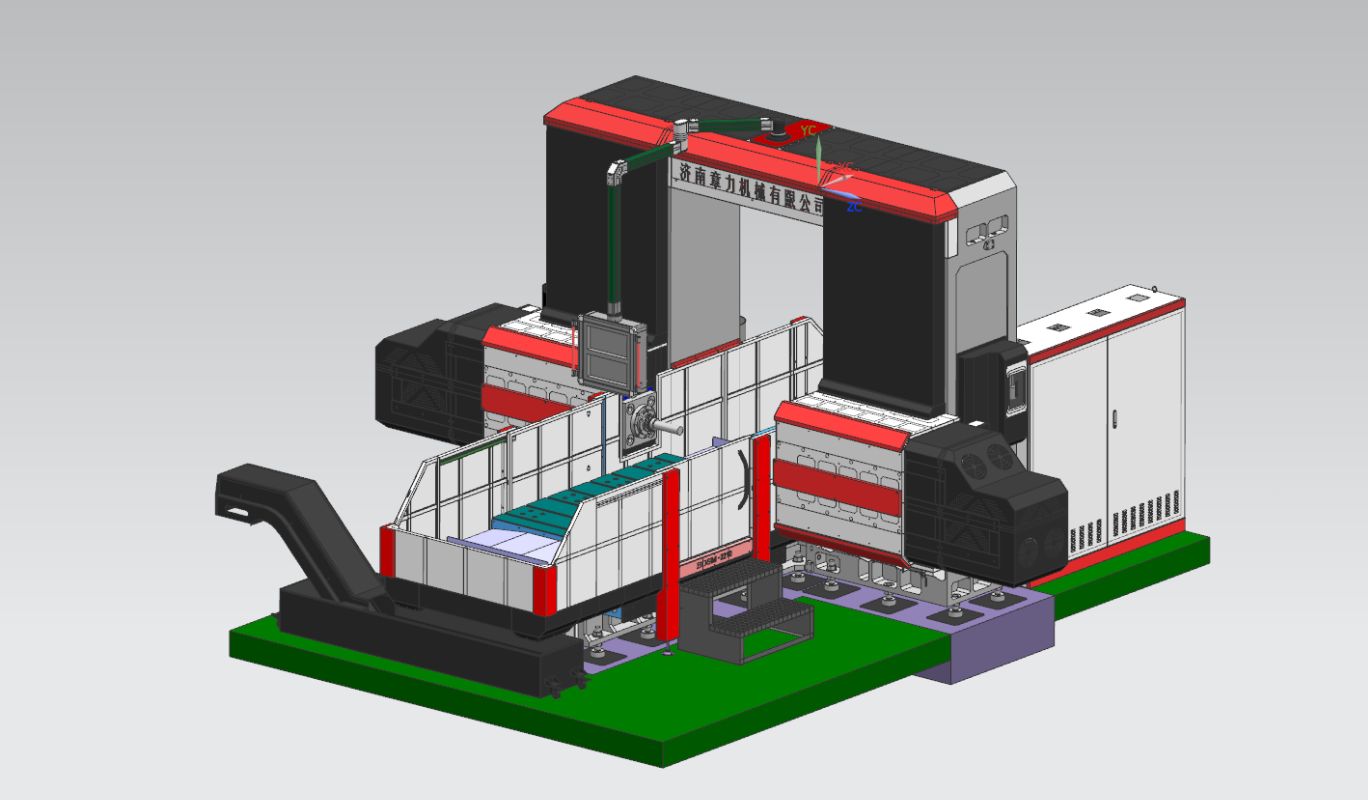
BOSM-5020-5Z CNC workbench เครื่องเจาะและกัดแบบหัวต่อหัวแบบเคลื่อนที่สองคอลัมน์เป็นเครื่องพิเศษสำหรับชิ้นงานสมมาตรเครื่องจักรวิศวกรรมเครื่องนี้มาพร้อมกับโต๊ะทำงานแบบเคลื่อนย้ายได้แบบพิเศษและเครื่องกระทุ้งแนวนอนสองชุด ซึ่งสามารถรับรู้การเจาะ การกัด การคว้าน และการประมวลผลอื่นๆ ของชิ้นงานภายในช่วงจังหวะที่มีประสิทธิภาพ ชิ้นงานสามารถประมวลผลในสถานที่ได้ในครั้งเดียว (ไม่จำเป็นต้อง แคลมป์รอง), ความเร็วในการขนถ่ายที่รวดเร็ว, ความเร็วในการกำหนดตำแหน่งที่รวดเร็ว, ความแม่นยำในการประมวลผลสูงและประสิทธิภาพการประมวลผลสูง
2.โครงสร้างอุปกรณ์:
2.1. ส่วนประกอบหลักของเครื่อง
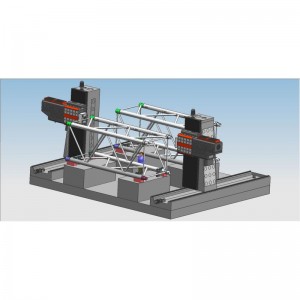
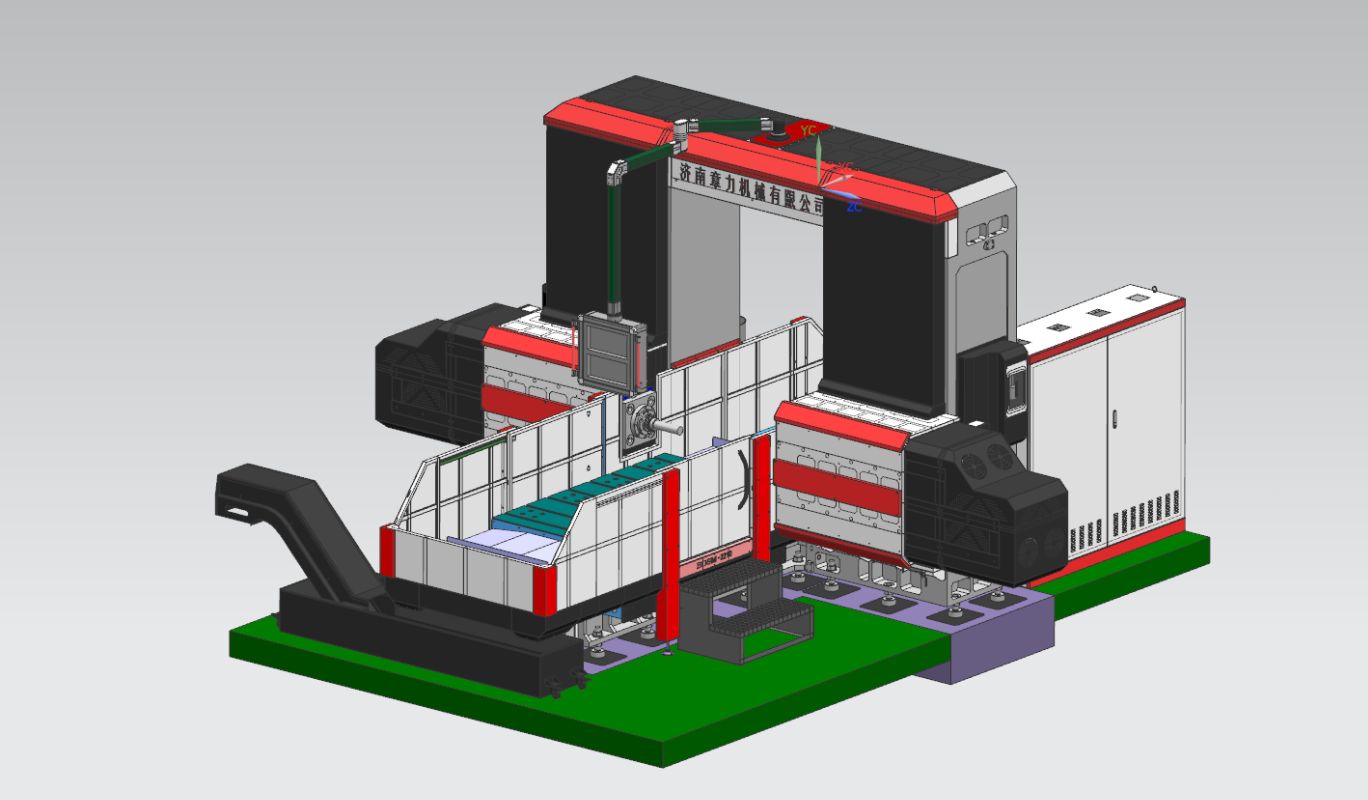
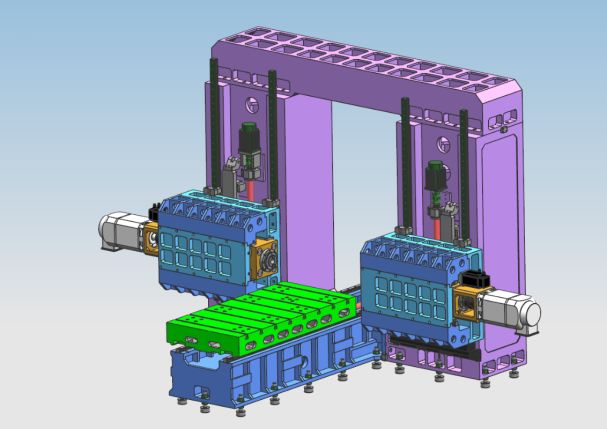
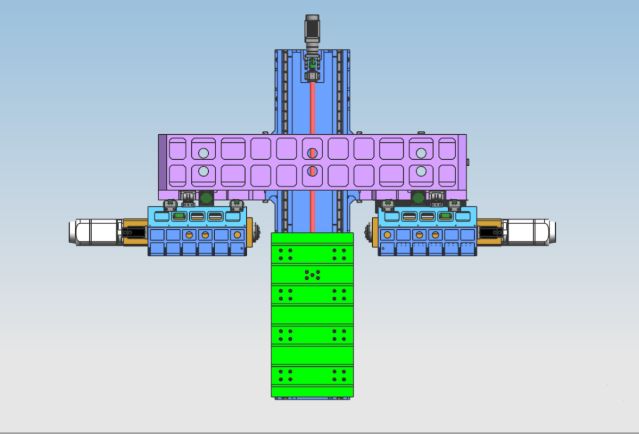
เตียง โต๊ะทำงาน เสาด้านซ้ายและขวา คาน คานเชื่อมต่อโครงสำหรับตั้งสิ่งของ อานม้า แรม ฯลฯ ทั้งหมดทำขึ้นจากการขึ้นรูปทรายเรซิน การหล่อเหล็กสีเทาคุณภาพสูง 250 อบอ่อนในบ่อทรายร้อน → การเสื่อมสภาพของการสั่นสะเทือน → การหลอมในเตาหลอม → อายุการสั่นสะเทือน → การกลึงหยาบ → อายุการสั่นสะเทือน → การหลอมเตาหลอม → อายุการสั่นสะเทือน → การตกแต่ง กำจัดความเครียดเชิงลบของชิ้นส่วนอย่างสมบูรณ์ และรักษาประสิทธิภาพของชิ้นส่วนให้คงที่เตียงคงที่ เสาด้านซ้ายและขวา โครงสำหรับตั้งสิ่งของ และโต๊ะทำงานเคลื่อนที่เครื่องจักรมีการกัด การคว้าน การตัด การเจาะ การจม การต๊าป และฟังก์ชั่นอื่น ๆ วิธีการระบายความร้อนของเครื่องมือคือการระบายความร้อนภายนอก เครื่องจักรประกอบด้วยแกนป้อน 5 แกน ซึ่งสามารถรับการเชื่อมโยง 4 แกน การกระทำเดี่ยว 5 แกน 5 หัวพลังงาน 2 หัว , แกนเครื่องจักร และ หัวจ่ายไฟ จะแสดงในรูปด้านล่าง
2.2. โครงสร้างหลักของส่วนฟีดเกียร์ตามแนวแกน
2.2.1.แกน X: โต๊ะทำงานจะตอบสนองในแนวขวางตามรางนำของเตียงยึดกับที่
การส่งผ่านแกน X: เซอร์โวมอเตอร์ AC และตัวลดดาวเคราะห์ที่มีความแม่นยำสูงใช้เพื่อขับเคลื่อนโต๊ะทำงานผ่านระบบส่งบอลสกรูเพื่อให้เกิดการเคลื่อนที่เชิงเส้นในแกน X
รูปแบบรางนำ: วางรางนำเชิงเส้นตรงที่มีความเที่ยงตรงสูง 2 ราง
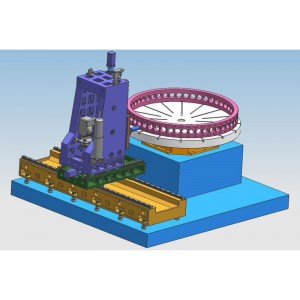
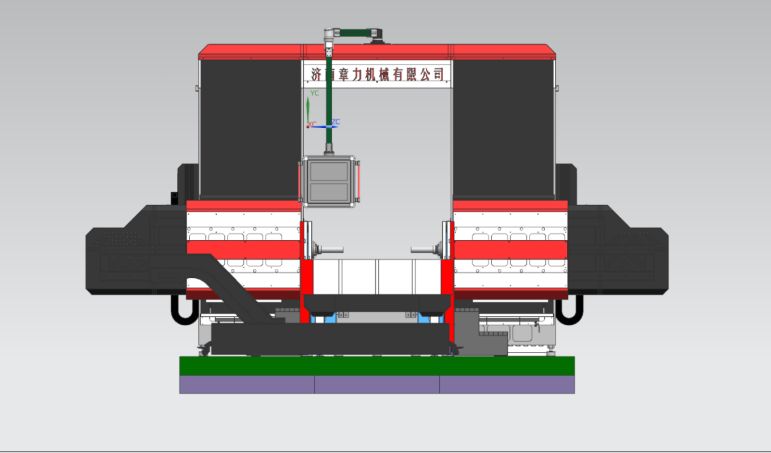
2.2.2.แกน Y1: หัวจ่ายไฟและตัวกระทุ้งติดตั้งในแนวตั้งที่ด้านหน้าของเสา และหันซ้ายขวาไปตามรางนำของเสา
การส่งผ่านแกน Y1: เซอร์โวมอเตอร์ AC ใช้เพื่อขับเคลื่อนบอลสกรูเพื่อขับเคลื่อนอานให้เคลื่อนที่ และตระหนักถึงการเคลื่อนที่เชิงเส้นของแกน Y1
รูปแบบรางนำ: รางนำเชิงเส้นชนิด 45 จำนวน 4 ชิ้น
2.2.3.Y2 แกน: แกะตัวที่สองของหัวพลังงานติดตั้งในแนวตั้งที่ด้านหน้าของคอลัมน์ และสลับไปทางซ้ายและขวาตามรางนำทางของคอลัมน์
การส่งผ่านแกน Y2: เซอร์โวมอเตอร์ AC ใช้เพื่อขับเคลื่อนบอลสกรูเพื่อขับเคลื่อนการเคลื่อนไหวของอานเพื่อให้ได้การเคลื่อนที่เชิงเส้นของแกน Y1
รูปแบบรางนำ: รางนำเชิงเส้นชนิด 45 จำนวน 4 ชิ้น


2.2.4.แกน Z1: อานแบบเลื่อนหัวไฟฟ้าติดตั้งในแนวตั้งที่ด้านหน้าของคอลัมน์ด้านขวา และเปลี่ยนกลับขึ้นและลงตามรางนำคอลัมน์
การส่งผ่านแกน Z1: เซอร์โวมอเตอร์ AC และตัวลดดาวเคราะห์ที่มีความแม่นยำสูงใช้เพื่อขับเคลื่อนแรมให้เคลื่อนที่ผ่านบอลสกรูเพื่อให้เกิดการเคลื่อนที่เชิงเส้นของแกน Z1
รูปแบบรางนำ: รางนำเชิงเส้นชนิด 2 65
แกน 2.2.5.Z2: อานแบบเลื่อนหัวไฟฟ้าติดตั้งในแนวตั้งที่ด้านหน้าของคอลัมน์ด้านขวา และเปลี่ยนกลับขึ้นและลงตามรางนำคอลัมน์
การส่งผ่านแกน Z1: เซอร์โวมอเตอร์ AC และตัวลดดาวเคราะห์ที่มีความแม่นยำสูงใช้เพื่อขับเคลื่อน ram ให้เคลื่อนที่ผ่านบอลสกรูเพื่อให้เกิดการเคลื่อนที่เชิงเส้นของแกน Z2
รูปแบบรางนำ: รางนำเชิงเส้นชนิด 2 65

คอลัมน์หล่อ HT250 คุณภาพสูง 2 ชิ้นของรางนำทางเชิงเส้นสำหรับงานหนัก 65 ชิ้น
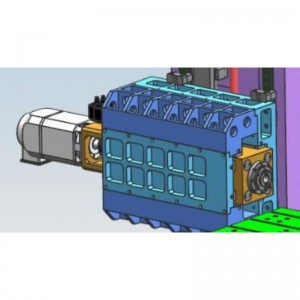
หัวคว้านและกัด (รวมถึงหัวจ่าย 1 และ 2) เป็นแบบสี่เหลี่ยมจัตุรัสผสม และทิศทางการเคลื่อนที่จะถูกนำทางโดยรางเลื่อนลูกกลิ้งเชิงเส้น 4 ชุดไดรฟ์ใช้มอเตอร์เซอร์โว AC เพื่อขับเคลื่อนคู่บอลสกรูที่มีความแม่นยำเครื่องมีแถบบาลานซ์ไนโตรเจน,ลดความสามารถในการรับน้ำหนักของหัวเครื่องจักรบนสกรูและเซอร์โวมอเตอร์มอเตอร์แกน Z มีฟังก์ชันเบรกอัตโนมัติในกรณีไฟดับ เบรกอัตโนมัติจะจับแกนมอเตอร์ไว้แน่นจนไม่สามารถหมุนได้เมื่อทำงาน เมื่อดอกสว่านไม่สัมผัสกับชิ้นงาน มันจะป้อนอย่างรวดเร็วเมื่อดอกสว่านสัมผัสกับชิ้นงาน มันจะเปลี่ยนเป็นฟีดการทำงานโดยอัตโนมัติเมื่อดอกสว่านเจาะเข้าไปในชิ้นงาน มันจะเปลี่ยนเป็นการกรอกลับอย่างรวดเร็วโดยอัตโนมัติเมื่อปลายดอกสว่านออกจากชิ้นงานและถึงตำแหน่งที่ตั้งไว้ ดอกสว่านจะเคลื่อนไปยังตำแหน่งรูถัดไปเพื่อให้เกิดการหมุนเวียนอัตโนมัติและสามารถใช้งานฟังก์ชั่นการเจาะรูตัน การกัด การลบมุม การหักเศษ การขจัดเศษอัตโนมัติ ฯลฯ ซึ่งช่วยปรับปรุงผลิตภาพแรงงาน


หัวจ่ายกำลังกระทุ้งแบบคอมพาวนด์สโตรคขนาด 500 มม. ใช้ลิเนียร์ไกด์แทนเม็ดมีดแบบดั้งเดิม เพื่อปรับปรุงความแม่นยำในการนำทางอย่างมากในขณะที่ยังคงความแข็งแกร่งของสแควร์แรม
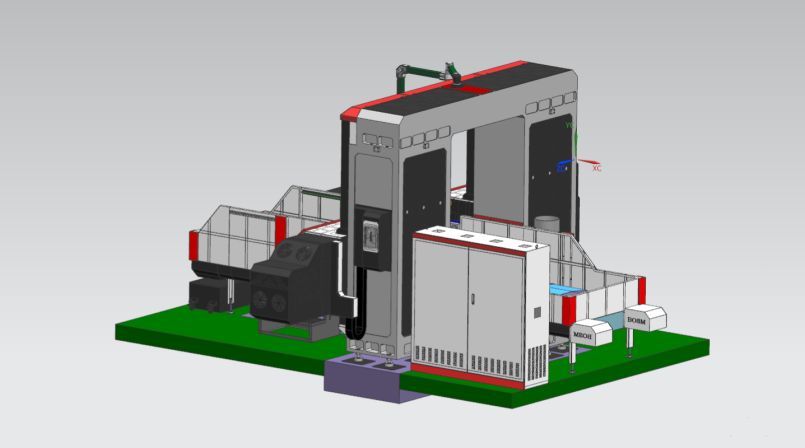
2.3. การกำจัดชิปและการระบายความร้อน
มีสายพานลำเลียงเศษโซ่แบบเกลียวและแบบแบนติดตั้งอยู่ที่ทั้งสองด้านใต้โต๊ะทำงาน และสามารถลำเลียงชิปไปยังสายพานลำเลียงชิปโดยอัตโนมัติในตอนท้ายผ่านแผ่นเกลียวและโซ่สองขั้นตอนเพื่อให้ได้การผลิตที่มีอารยธรรมมีปั๊มระบายความร้อนในถังน้ำหล่อเย็นของสายพานลำเลียงชิป ซึ่งสามารถใช้สำหรับการระบายความร้อนภายนอกของเครื่องมือ เพื่อให้มั่นใจในประสิทธิภาพและอายุการใช้งานของเครื่องมือ และน้ำหล่อเย็นสามารถนำไปรีไซเคิลได้

3.ระบบควบคุมตัวเลขดิจิตอลเต็มรูปแบบ:
3.1.ด้วยฟังก์ชันการหักเศษ เวลาการหักเศษ และรอบการหักเศษสามารถตั้งค่าได้บนอินเทอร์เฟซระหว่างคนกับเครื่องจักร
3.2.เมื่อติดตั้งฟังก์ชันการยกเครื่องมือแล้ว สามารถตั้งค่าระยะการยกเครื่องมือได้บนอินเทอร์เฟซระหว่างคนกับเครื่องจักรเมื่อถึงระยะ เครื่องมือจะถูกยกขึ้นอย่างรวดเร็ว จากนั้นเศษจะถูกโยนทิ้ง จากนั้นจะถูกส่งต่อไปยังพื้นผิวการเจาะอย่างรวดเร็วและแปลงให้ทำงานโดยอัตโนมัติ
3.3.กล่องควบคุมการทำงานแบบรวมศูนย์และตัวเครื่องแบบมือถือนำระบบควบคุมแบบตัวเลขมาใช้ และติดตั้งอินเทอร์เฟซ USB และจอแสดงผลคริสตัลเหลว LCDเพื่ออำนวยความสะดวกในการเขียนโปรแกรม การจัดเก็บ การแสดงผล และการสื่อสาร อินเทอร์เฟซการทำงานมีฟังก์ชันต่างๆ เช่น บทสนทนาระหว่างคนกับเครื่องจักร การชดเชยข้อผิดพลาด และการเตือนอัตโนมัติ
3.4.อุปกรณ์มีฟังก์ชั่นการแสดงตัวอย่างและตรวจสอบตำแหน่งรูอีกครั้งก่อนการประมวลผล และการดำเนินการสะดวกมาก
4.หล่อลื่นอัตโนมัติ
คู่รางนำเชิงเส้นความแม่นยำของเครื่องจักร คู่บอลสกรูที่แม่นยำ และคู่การเคลื่อนที่ที่มีความแม่นยำสูงอื่นๆ ติดตั้งระบบหล่อลื่นอัตโนมัติปั๊มหล่อลื่นอัตโนมัติจะส่งน้ำมันแรงดันออกมา และห้องน้ำมันหล่อลื่นเชิงปริมาณจะเข้าสู่น้ำมันหลังจากห้องน้ำมันเต็มไปด้วยน้ำมัน เมื่อความดันของระบบเพิ่มขึ้นเป็น 1.4-1.75Mpa สวิตช์ความดันในระบบจะปิด ปั๊มจะหยุดทำงาน และวาล์วขนถ่ายจะขนถ่ายในเวลาเดียวกันเมื่อแรงดันน้ำมันบนถนนลดลงต่ำกว่า 0.2Mpa เครื่องหล่อลื่นเชิงปริมาณจะเริ่มเติมน้ำมันที่จุดหล่อลื่นและทำการเติมน้ำมันหนึ่งครั้งเนื่องจากการจ่ายน้ำมันที่แม่นยำของหัวฉีดน้ำมันเชิงปริมาณและการตรวจจับแรงดันของระบบ การจ่ายน้ำมันจึงเชื่อถือได้ ทำให้มั่นใจได้ว่ามีฟิล์มน้ำมันบนพื้นผิวของคู่ไคเนมาติกแต่ละคู่ ช่วยลดแรงเสียดทานและการสึกหรอ และป้องกันความเสียหายต่อ โครงสร้างภายในที่เกิดจากความร้อนสูงเกินไปเพื่อให้แน่ใจว่าความถูกต้องและอายุการใช้งานของเครื่องจักรเมื่อเทียบกับคู่รางเลื่อน คู่รางเลื่อนเชิงเส้นที่ใช้ในเครื่องนี้มีข้อดีหลายประการ:
①ความไวในการเคลื่อนไหวสูง ค่าสัมประสิทธิ์แรงเสียดทานของรางเลื่อนมีขนาดเล็กเพียง 0.0025~0.01 และกำลังขับเคลื่อนลดลงอย่างมาก ซึ่งเท่ากับ 1/10 ของเครื่องจักรทั่วไปเท่านั้น
② ความแตกต่างระหว่างแรงเสียดทานไดนามิกและสถิตนั้นน้อยมาก และประสิทธิภาพการติดตามก็ยอดเยี่ยม กล่าวคือ ช่วงเวลาระหว่างสัญญาณการขับขี่และการทำงานของกลไกนั้นสั้นมาก ซึ่งเอื้อต่อการปรับปรุงความเร็วในการตอบสนองและความไวของ ระบบควบคุมด้วยตัวเลข
③เหมาะสำหรับการเคลื่อนที่เชิงเส้นด้วยความเร็วสูง และความเร็วสูงกว่ารางนำเลื่อนประมาณ 10 เท่า
④ สามารถรับรู้ถึงการเคลื่อนไหวที่ไร้ช่องว่างและปรับปรุงความแข็งแกร่งในการเคลื่อนไหวของระบบกลไก
⑤ผลิตโดยผู้ผลิตมืออาชีพ มีความแม่นยำสูง ใช้งานได้หลากหลาย และบำรุงรักษาง่าย
5.การตรวจสอบด้วยเลเซอร์สามแกน:
เครื่อง Bosman แต่ละเครื่องได้รับการสอบเทียบโดยเลเซอร์อินเตอร์เฟอโรมิเตอร์ของบริษัท RENISHAW ในสหราชอาณาจักรเพื่อตรวจสอบและชดเชยข้อผิดพลาดของระยะพิทช์ ฟันเฟือง ความแม่นยำของตำแหน่ง ความแม่นยำในการระบุตำแหน่งซ้ำ ฯลฯ อย่างแม่นยำ เพื่อให้มั่นใจถึงไดนามิก ความเสถียรคงที่ และความแม่นยำในการประมวลผลของ เครื่องจักร .การตรวจสอบบอลบาร์แต่ละเครื่องใช้บอลบาร์จากบริษัท RENISHAW ของอังกฤษเพื่อสอบเทียบความแม่นยำของวงกลมที่แท้จริงและความแม่นยำทางเรขาคณิตของเครื่องจักร และทำการทดลองการตัดแบบวงกลมไปพร้อมกันเพื่อให้มั่นใจในความแม่นยำของการตัดเฉือนแบบ 3 มิติและความแม่นยำแบบวงกลมของเครื่องจักร


6.สภาพแวดล้อมการใช้งานเครื่อง:
6.1.ข้อกำหนดด้านสภาพแวดล้อมการใช้งานอุปกรณ์
การรักษาระดับอุณหภูมิแวดล้อมให้คงที่เป็นปัจจัยสำคัญสำหรับการตัดเฉือนที่แม่นยำ
(1) ข้อกำหนดอุณหภูมิแวดล้อมที่มีคือ -10°C ถึง 35°C เมื่ออุณหภูมิแวดล้อม 20°C ความชื้นควรอยู่ที่ 40% ถึง 75%
(2) เพื่อให้ความแม่นยำคงที่ของเครื่องอยู่ในช่วงที่กำหนด อุณหภูมิแวดล้อมที่เหมาะสมจะต้องอยู่ที่ 15°C ถึง 25°C และความแตกต่างของอุณหภูมิต้องไม่เกิน ±2°C/24h
6.2.แรงดันไฟฟ้าของแหล่งจ่ายไฟ: 3 เฟส, 380V, ภายในช่วงความผันผวนของแรงดันไฟฟ้า ±10%, ความถี่ของแหล่งจ่ายไฟ: 50Hz
6.3.หากแรงดันไฟฟ้าในบริเวณที่ใช้งานไม่เสถียร เครื่องควรติดตั้งแหล่งจ่ายไฟที่เสถียรเพื่อให้แน่ใจว่าเครื่องทำงานได้ตามปกติ
6.4.เครื่องควรมีสายดินที่เชื่อถือได้: สายดินเป็นลวดทองแดง เส้นผ่านศูนย์กลางของลวดไม่ควรน้อยกว่า 10 มม.² และความต้านทานของสายดินควรน้อยกว่า 4 โอห์ม
6.5.เพื่อให้แน่ใจว่าประสิทธิภาพการทำงานปกติของอุปกรณ์ หากอากาศอัดของแหล่งอากาศไม่เป็นไปตามข้อกำหนดของแหล่งอากาศ ควรเพิ่มชุดอุปกรณ์ฟอกอากาศ (ลดความชื้น ล้างไขมัน กรอง) ก่อนอากาศเข้า ของเครื่อง.
6.6.เก็บอุปกรณ์ให้ห่างจากแสงแดดโดยตรง แหล่งการสั่นสะเทือนและความร้อน เครื่องกำเนิดความถี่สูง เครื่องเชื่อมไฟฟ้า ฯลฯ เพื่อหลีกเลี่ยงความล้มเหลวในการผลิตเครื่องจักรหรือการสูญเสียความแม่นยำของเครื่องจักร
7. พารามิเตอร์ทางเทคนิค:
| แบบอย่าง | 5020-5Z | |
| ขนาดชิ้นงานการประมวลผลสูงสุด | ยาว × กว้าง × สูง (มม.) | 5000×2000×2500 |
| ฟีดสูงสุดของโครงสำหรับตั้งสิ่งของ | ความกว้าง (มม.) | 2300 |
| ขนาดโต๊ะทำงาน | ยาว X กว้าง (มม.) | 5,000*2000 |
| การเดินทางของตาราง | โต๊ะทำงานเลื่อนไปมา (มม.) | 5,000 |
| แรมคู่ยกขึ้นและลง | ระยะกระทุ้งขึ้นลง (มม.) | 2500 |
| หัวเจาะชนิดกระทุ้งแนวนอน หัวพาวเวอร์ หนึ่ง สอง | ปริมาณ (2) | 2 |
| หัวเจาะชนิดกระทุ้งแนวนอน หัวพาวเวอร์ หนึ่ง สอง | แกนเตเปอร์ | บีที50 |
| ความเร็วแกนหมุน (รอบ/นาที) | 30~5000 | |
| กำลังมอเตอร์แกนเซอร์โว (กิโลวัตต์) | 37*2 | |
| ระยะห่างระหว่างจุดศูนย์กลางปลายจมูกของแกนหมุนทั้งสอง (มม.) | 1500-2500มม | |
| จังหวะซ้ายและขวาของ ram เดี่ยว (มม.) | 500 | |
| จังหวะซ้ายและขวาของกระทุ้งคู่ (มม.) | 1,000 | |
| ความแม่นยำของตำแหน่งแบบสองทิศทาง | 300มม.*300มม | ±0.025 |
| ความแม่นยำในการวางตำแหน่งซ้ำแบบสองทิศทาง | 300มม.*300มม | ±0.02 |
| น้ำหนักรวม (t) | (ประมาณ)55 | น้ำหนักรวม (t) |