ระบบเชื่อมหุ่นยนต์สำหรับวาล์ว


ข้อมูลจำเพาะ
|
รุ่น |
TKB 2670/2690 |
|
|
น้ำหนักบรรทุก |
20 กก |
|
|
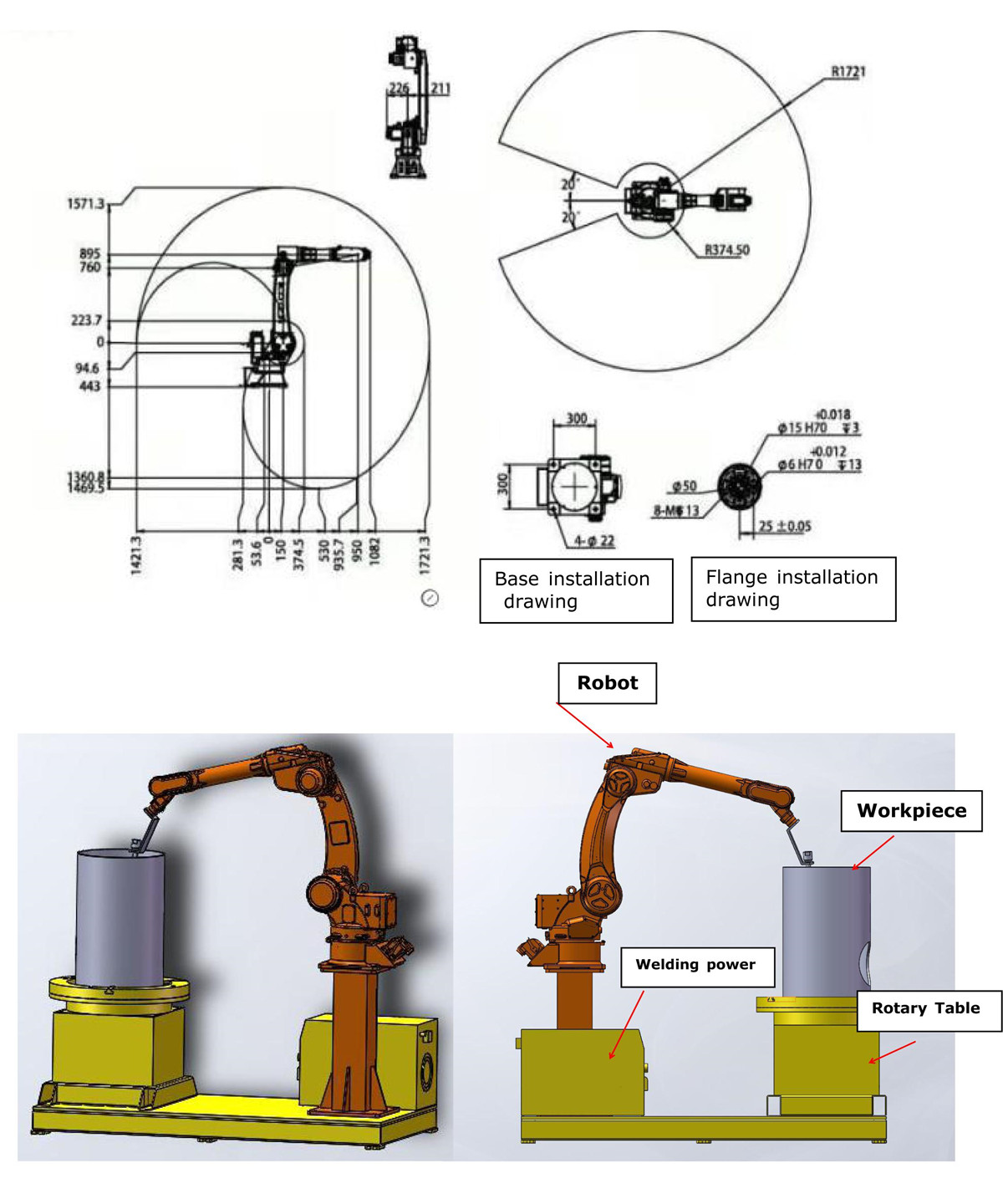
รัศมีการทำงานสูงสุด |
1721 * 1921 มม |
|
|
DOF |
6 แกน |
|
|
น้ำหนักตัว |
210 กก |
|
|
แบรนด์ลด |
นำเข้า |
|
|
กำลังไฟ |
7.5 กิโลวัตต์ |
|
|
ความเร็วสูงสุด |
J1 |
140 ° / วิ |
|
J2 |
111 ° / วินาที |
|
|
J3 |
148 ° / วินาที |
|
|
J4 |
234 ° / วิ |
|
|
J5 |
225 ° / วินาที |
|
|
J6 |
360 ° / วินาที |
|
|
พื้นที่ปฏิบัติการสูงสุด |
J1 |
± 160 ° |
|
J2 |
150 ° ~ 90 ° |
|
|
J3 |
80 ° ~ 100 ° |
|
|
J4 |
± 150 ° |
|
|
J5 |
± 110 ° |
|
|
J6 |
± 300 ° |
|
|
ข้อกำหนดการป้องกัน |
54 |
|
|
ความแม่นยำในการทำซ้ำตำแหน่ง |
± 0.1 มม |
|
|
อุณหภูมิในการทำงาน |
0 ~ 45 & องศา; |
|
|
ด้วยใบรับรอง CE |
||
เค้าโครงการทำงาน
เครื่องเชื่อม
เครื่องเดียวเป็นเครื่องอเนกประสงค์และสามารถใช้งานการเชื่อม CO2 / MAG การเชื่อมด้วยมือการเซาะอาร์กคาร์บอนในเวลาเดียวกันและใช้พลังในการแปรรูปแผ่นหนาเช่นโครงสร้างเหล็กสะพานและการต่อเรือ
การควบคุมไมโครคอมพิวเตอร์การตั้งค่าสภาพการเชื่อมเป็นฟังก์ชันการปรับที่รวมเป็นหนึ่งเดียวอย่างสมบูรณ์ใช้งานง่าย
ในการเชื่อม CO2 / MAG แม้ว่ามือจะสั่นไมโครคอมพิวเตอร์สามารถควบคุมแบบไดนามิกและรวดเร็วแบบเรียลไทม์เพื่อรักษาเสถียรภาพของอาร์กเชื่อมอย่างเต็มที่
ฟังก์ชั่นการตัดส่วนโค้งของคาร์บอนสามารถรับรู้การกำจัดรากและการกำจัดข้อบกพร่องในการเชื่อม
ฟังก์ชันป้องกันกระแสเกิน SCR ทำให้ประสิทธิภาพของเครื่องเชื่อมมีความน่าเชื่อถือมากขึ้น
ประสิทธิภาพในการสตาร์ทส่วนโค้งนั้นเหนือกว่าและสามารถจับคู่กับระนาบพิเศษได้อย่างง่ายดาย
ข้อมูลจำเพาะ
|
สิ่งของ |
XD600 ก |
||
|
กำลังเชื่อม |
แบบ |
GPXDG-600 |
|
|
แรงดันไฟฟ้าขาเข้า |
V, เฮิรตซ์ |
3,380V ± 10%, 50 / 60Hz |
|
|
ความจุอินพุตที่กำหนด |
kVA |
47.7 (36.6kW) |
|
|
ช่วงกระแสไฟขาออก |
CO2 / MAG / NMA |
A |
60 ~ 600 |
|
การแซะส่วนโค้งของคาร์บอน |
100 ~ 600 |
||
|
ระยะเวลาการโหลดที่กำหนด |
% |
100 |
|
|
ขนาด (WHD) |
มม |
508 * 724 * 894 |
|
|
น้ำหนัก |
กิโลกรัม |
252 |
|
|
เครื่องป้อนลวด |
แบบ |
ซม. xl-2301 |
|
|
ปืนเชื่อม |
แบบ |
WT5000-SCD |
|
|
ตัวควบคุมการไหลของแก๊ส |
แบบ |
W-198-36V |
|
|
สายเชื่อม |
รุ่น |
กทม. -7002 |
|